レジストレーション
2つの点群の読み込み
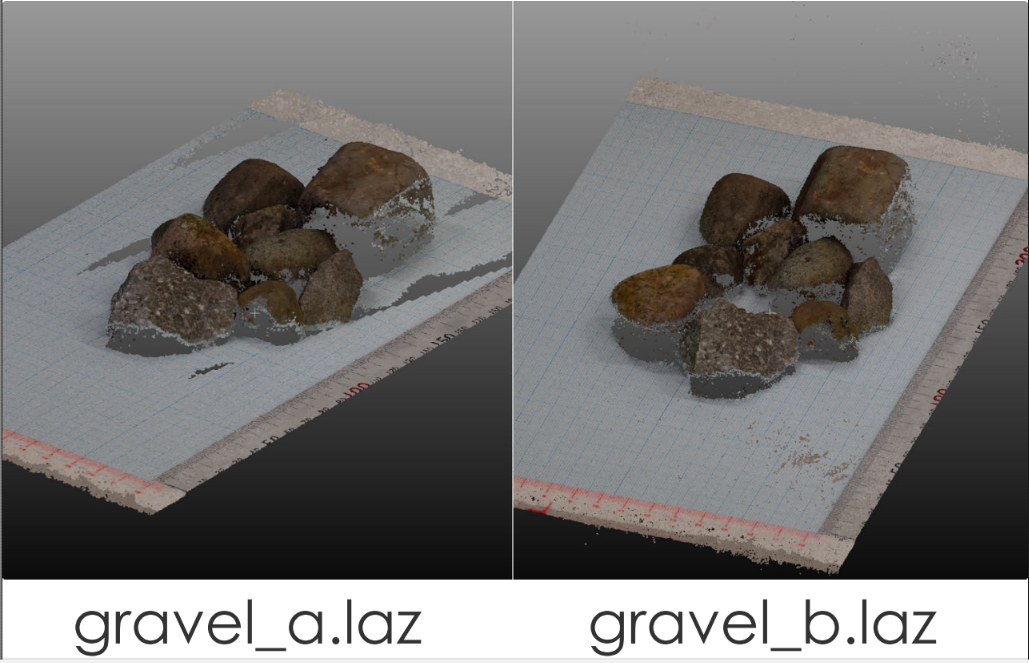
点群の位置合わせ方法
- 手作業での移動(不正確)
- 対照点に基づく位置合わせ
- 自動位置合わせ
(ICP: Iterative Closeset Point)
対照点に基づく位置合わせ
- 二つの点群を選択(Shift+クリック)
- Tools > Registration > Align (point pairs picking)
- gravel_aを基準(Reference)に ←Swap
- 同一の点を4~6箇所選択(左クリック)
- 特徴的な点(物の角など)を選択
- なるべく点群全体、広範囲、Z方向にも様々に
- 移動と基準の点群をそれぞれ個別に表示し、同じ順で特徴点を選択
- show ‘to align’ cloud / show ‘reference’ cloud
- 視点変更・ズームインなどでなるべく正確に選択
- ただし、あとで自動位置合わせをする前提では大まかでもOK

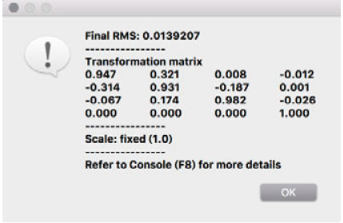
- ‘align’をクリック→結果のプレヴュー
- エラーの確認
- エラーの大きい点の除去、他の対照点の追加
☑→確定
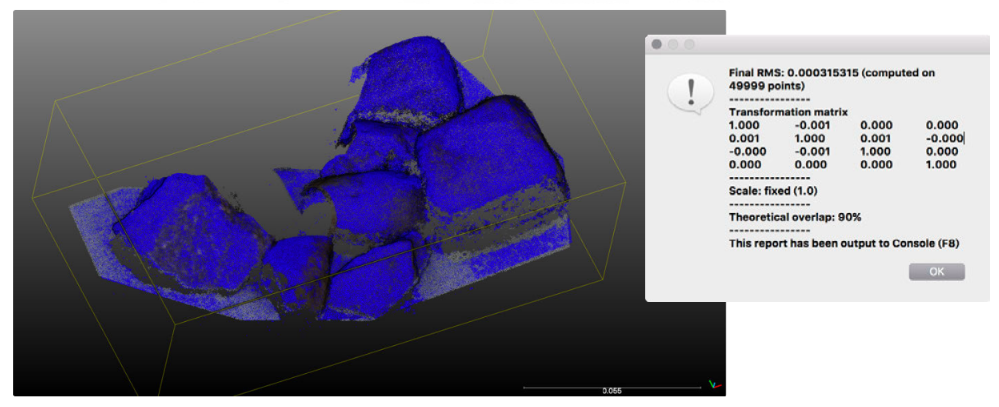
- RMSの表示
- その他オプション
- ‘adjust scale’:スケールを変更してもよい場合
- ‘Rotation’:軸を固定可能(水平が取れている等)
- 外部の参照点(GCP)座標も入力可能
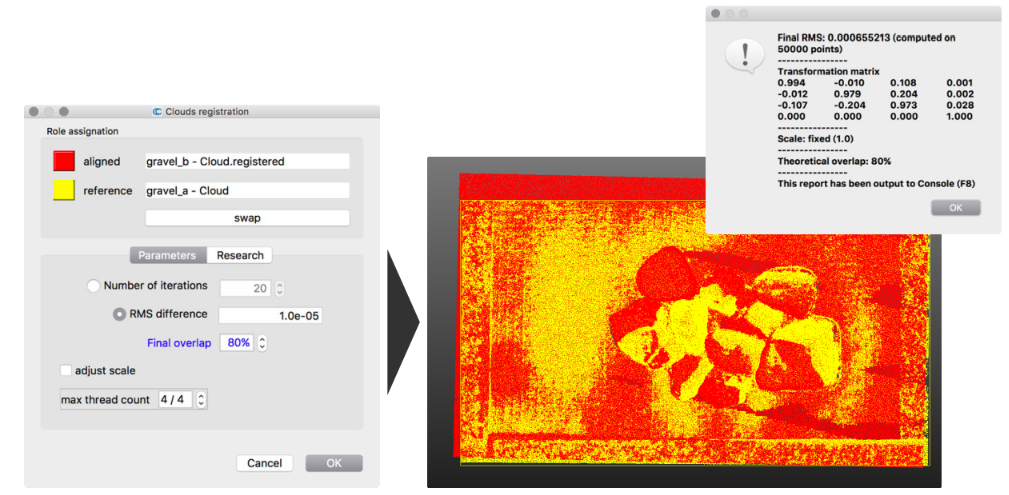
自動位置合わせ(ICP)
- 二つの点群を選択(Shift+クリック)
- Tools > Registration > Fine registration (ICP)
- gravel_aを基準(Reference)に ←Swap
- “overlap” 変化を加味して80%
- 「不変箇所」のみに適用
- 複製(!)
- セグメンテーション後の点群でICP
- →変換行列を元の点群に適用する
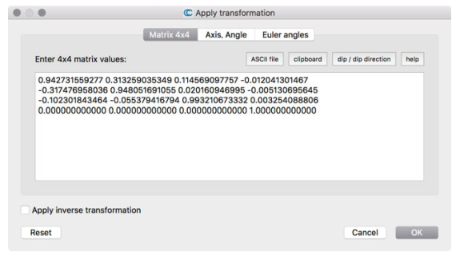
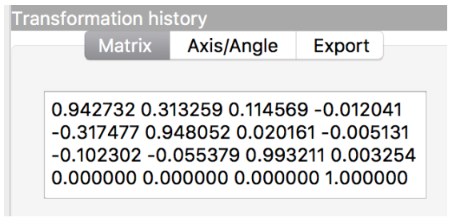
- 変換行列(Transformation Matrix)
- プロパティ画面
- Export > Clipboard
- 変換前の元の点群を読込
- 変換行列を適用する
- Edit > Apply transformation > clipboard