3. 解析
“Fixしない?衛星を減らしてみたら?“
L1-DGNSSとRTKLIBによるPPK解析
解析のフローチャート
解析(屋内作業)
- Base/Rover受信機からUBXファイルをダウンロード
- uBlox社の受信機を使用した場合
- RTKCONVでUBXをRINEXファイルに変換
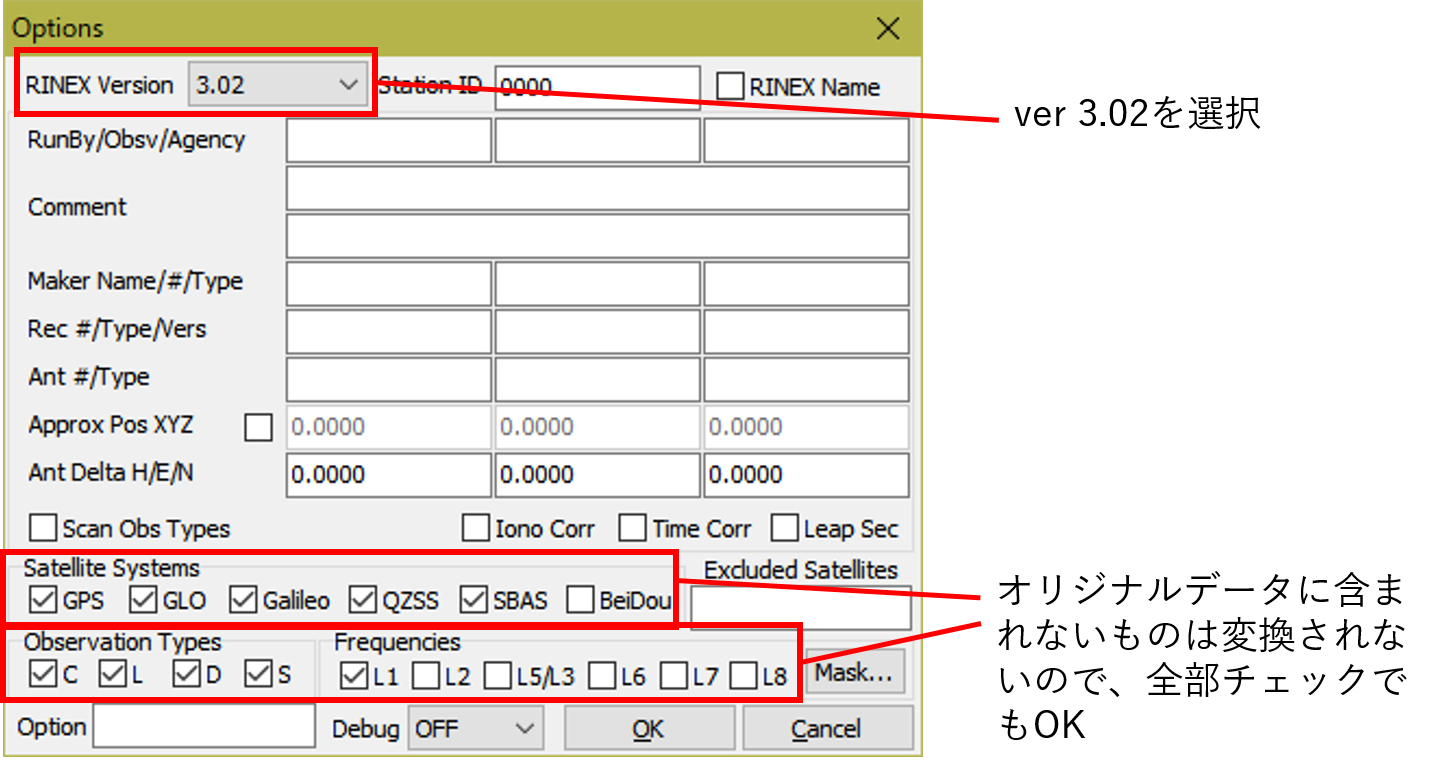
- 電子基準点に合わせてRINEX ver.3.02を使用
- RTKPOSTでRoverの座標を求める
- 定位置を計測した場合の測位モードはStaticを使用
- Baseの座標が未知の場合:Roverの座標は相対値
- Baseの座標が既知の場合:Roverの座標は絶対値
- Roverの座標を得る
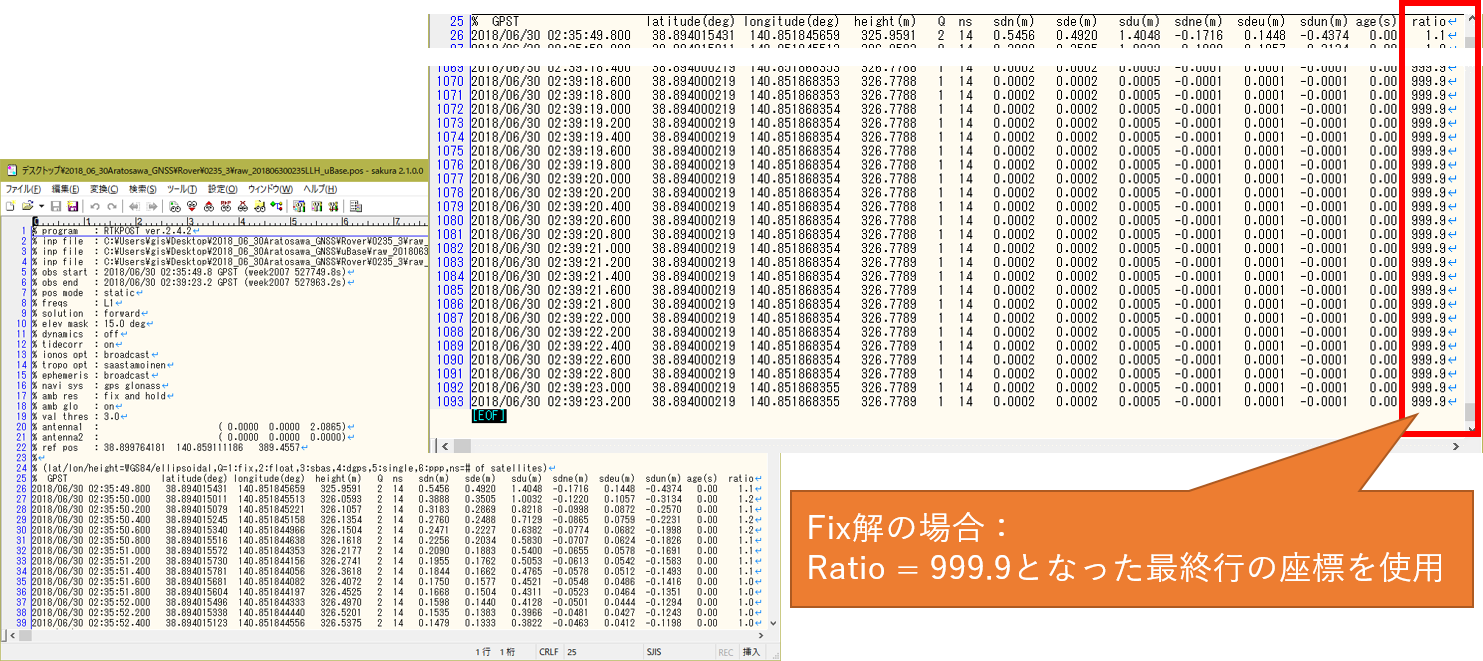
- 解析結果(.pos)のテキストファイルを参照
- Fix解の場合:Ratio = 999.9となった最終行の座標
- Float解の場合:Ratioが最も高い行の座標
事前準備(ダウンロードする)
- RTKLIB(RTKCONVやRTKPOSTなどの解析ソフトウェア群。最新版はrtklib 2.4.2 p13)
- GSIGEO2011(ジオイドモデル)
- 最新版は「日本のジオイド2011」(Ver.2) , ただしRTKLIB 2.4.2では日本全域に対応していない(正常動作しない地域がある)
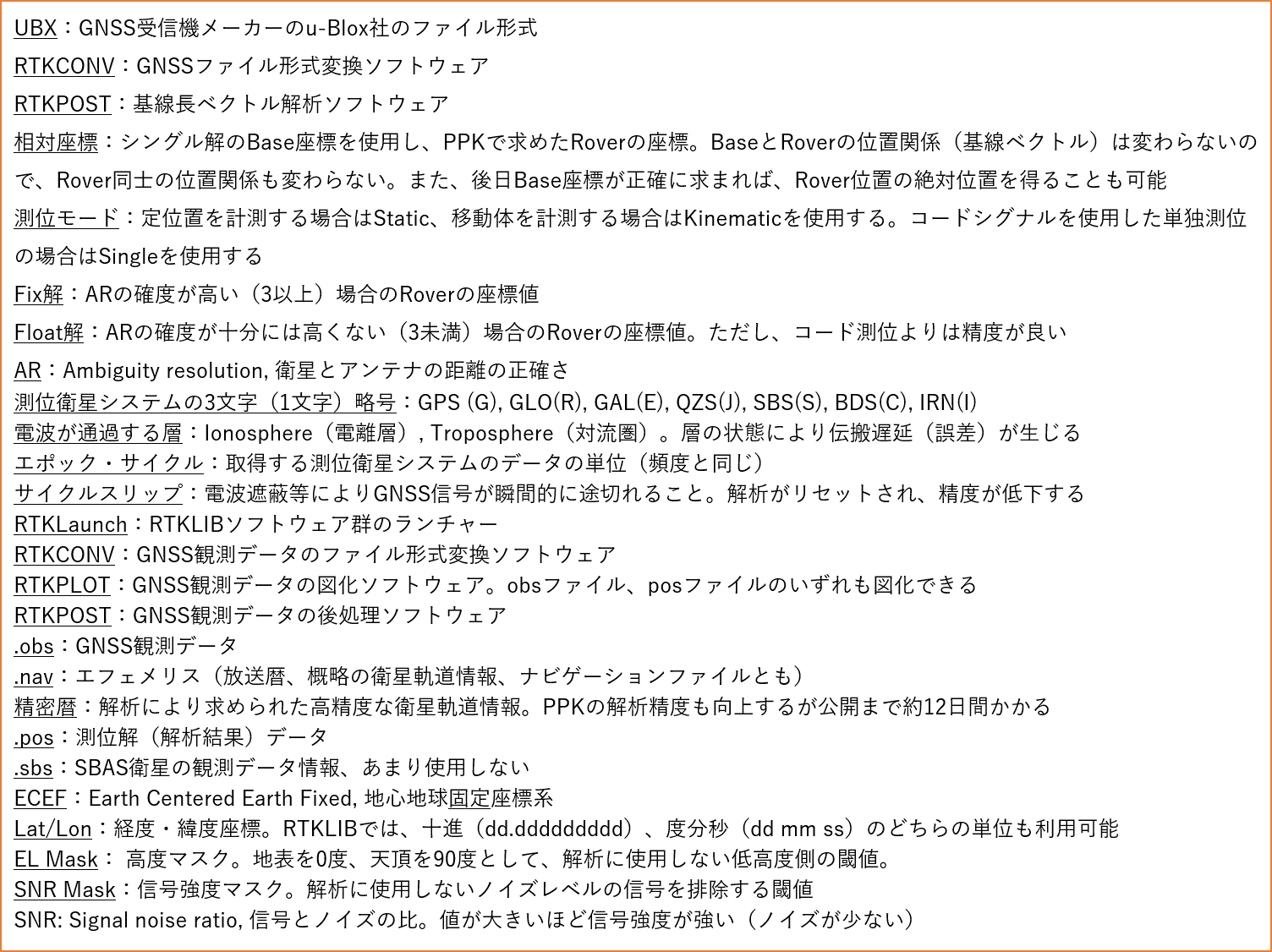
基本用語集
事前準備
RTKLIBのダウンロード
最新版のソースコード
https://github.com/tomojitakasu
- ソースコードを読むとマニュアルにない機能の意味がわかる(時もある)
- 現在はgithubで最新版の開発・公開が行われているもよう
最新版のバイナリ(開発者ではない人はこちら) https://github.com/tomojitakasu/RTKLIB_bin
- WindowsのGUIで使用するならバイナリ(exeファイル)を使用する
- binフォルダ全体をダウンロード
RTKLIBの動作確認
RTKLIBが動かない場合
講習会などでよくある現象
Executeをクリックしても処理ができない、エラー終了する
→ 「管理者として実行」する処理は開始されるが、ファイルが出力されない
→ダウンロードするバージョンを変えてみるどうしても処理ができない(正しく動かない)
→正常動作している人のバイナリファイルのコピーをもらう
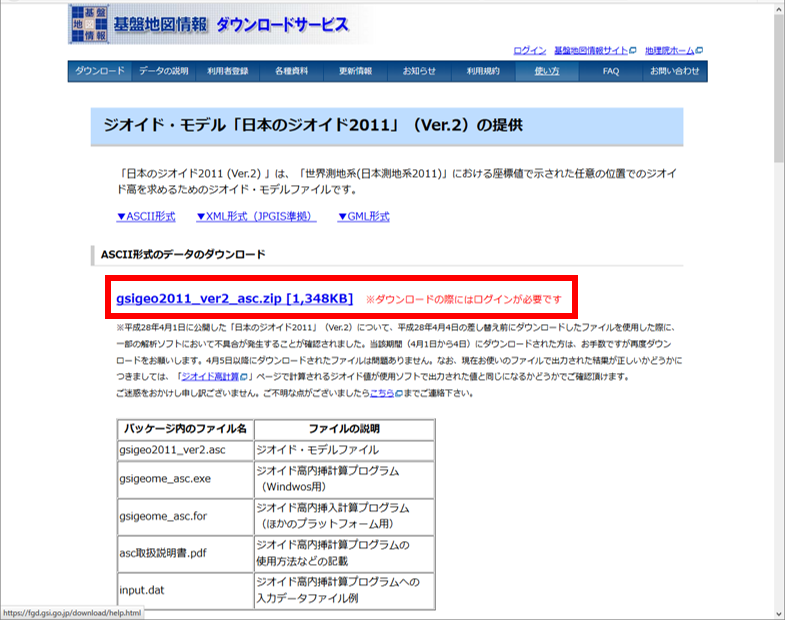
GSIGEO2011のダウンロード
最新版「日本のジオイド2011」(Ver.2)
RTKLIB 2.4.2は最新のジオイドモデルに対応していない(正常動作しない地域がある)国土地理院「ジオイド高計算」
RTKLIBでは楕円体高で計算し、このWebサイトでジオイドを求めてもよい-
- 使用するファイル:gsigeo2011_ver2.asc
- RTKLIB 2.4.2は最新のジオイドモデルに対応していない(正常動作しない地域がある)
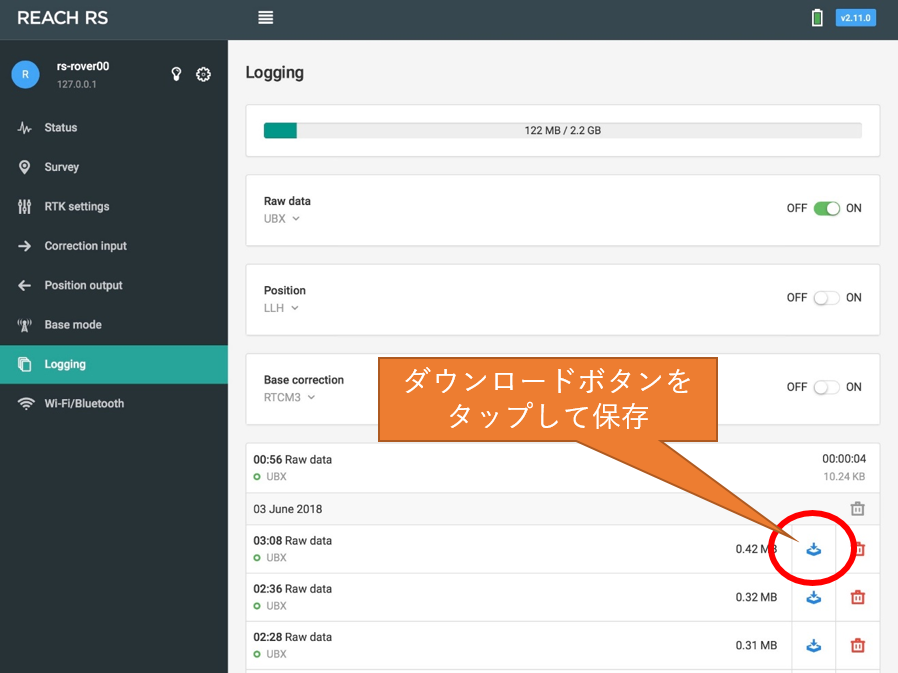
観測データのダウンロード
Base/Rover受信機から観測データをダウンロード
観測データ(UBXファイル)のダウンロード
- EMLID Reach RS / Reach RTKの例
- 受信機にWi-Fi接続し、観測データをダウンロード
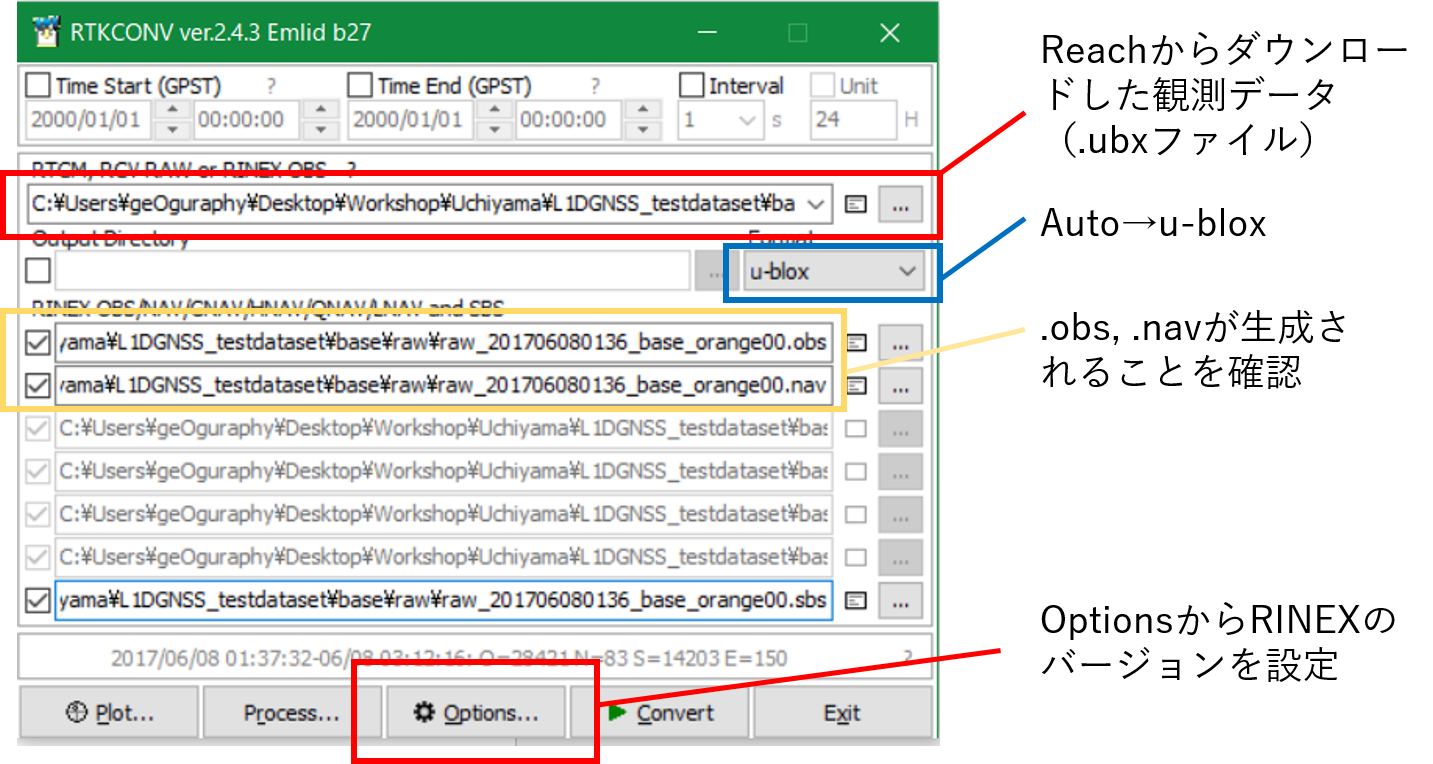
RINEX変換
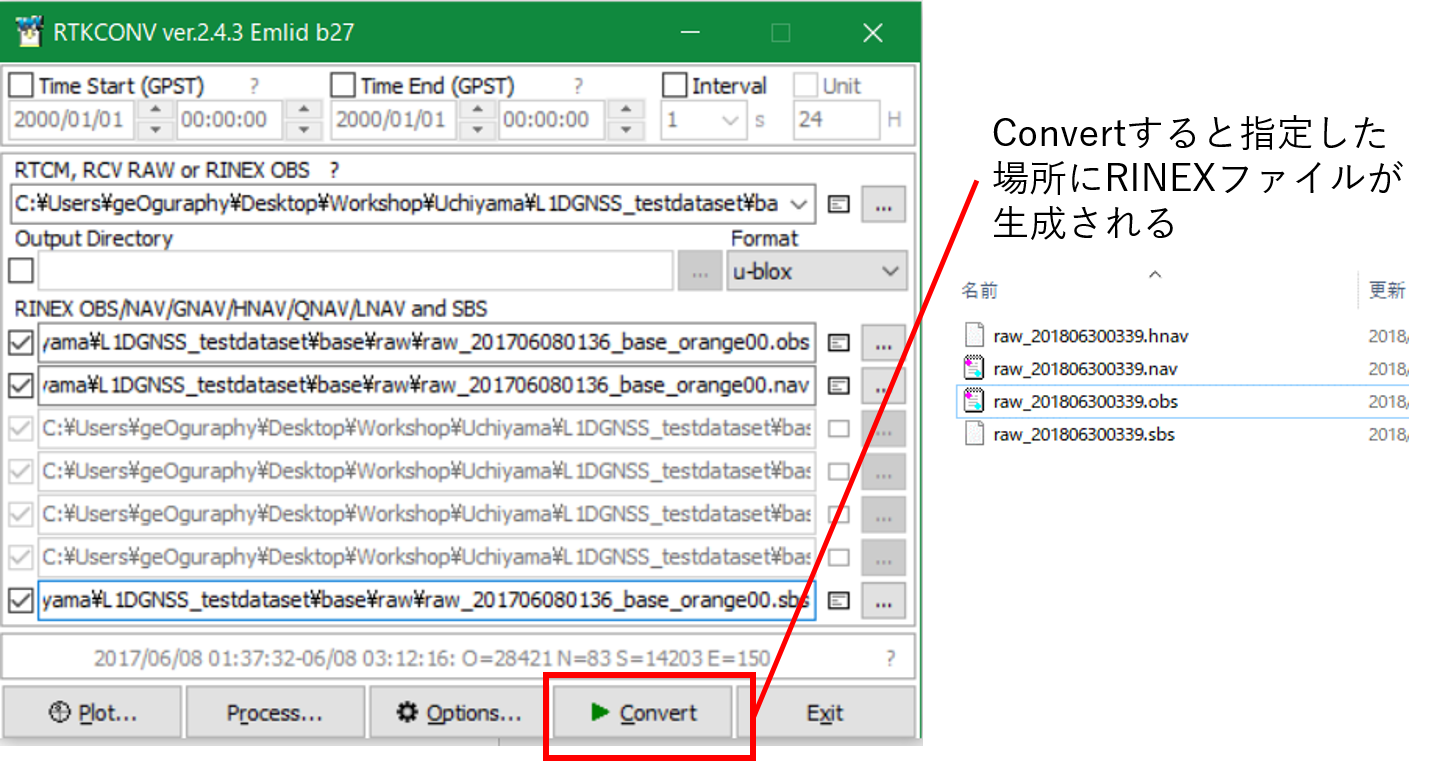
RTKCONVでUBXをRINEXファイルに変換
- 電子基準点に合わせてRINEX ver.3.02を使用
- RTKLIBの解析ではRINEX形式のデータを使用する
- Reach RS / Reach RTKではu-blox社のネイティブファイル(.ubx)形式で保存される
- RTKCONVは各社のネイティブファイルをRINEXに変換するツール
- 一部のメーカーの観測データは変換できない(ファイル仕様が公開されていない)
- 変換元ファイル名にアスタリスク「 * 」を使用すると、連続しているが分割されて生成された複数ファイルを一つのRINEXファイルに変換可能 開始・終了の年月日時分秒を指定すると、その期間のRINEXファイルを出力することもできる(動作が軽くなる)
RTKCONV(RTKLIB/bin/rtkconv.exe)
PPK解析 ~解析の基本手順をBaseの絶対座標を使用しない例で示す~
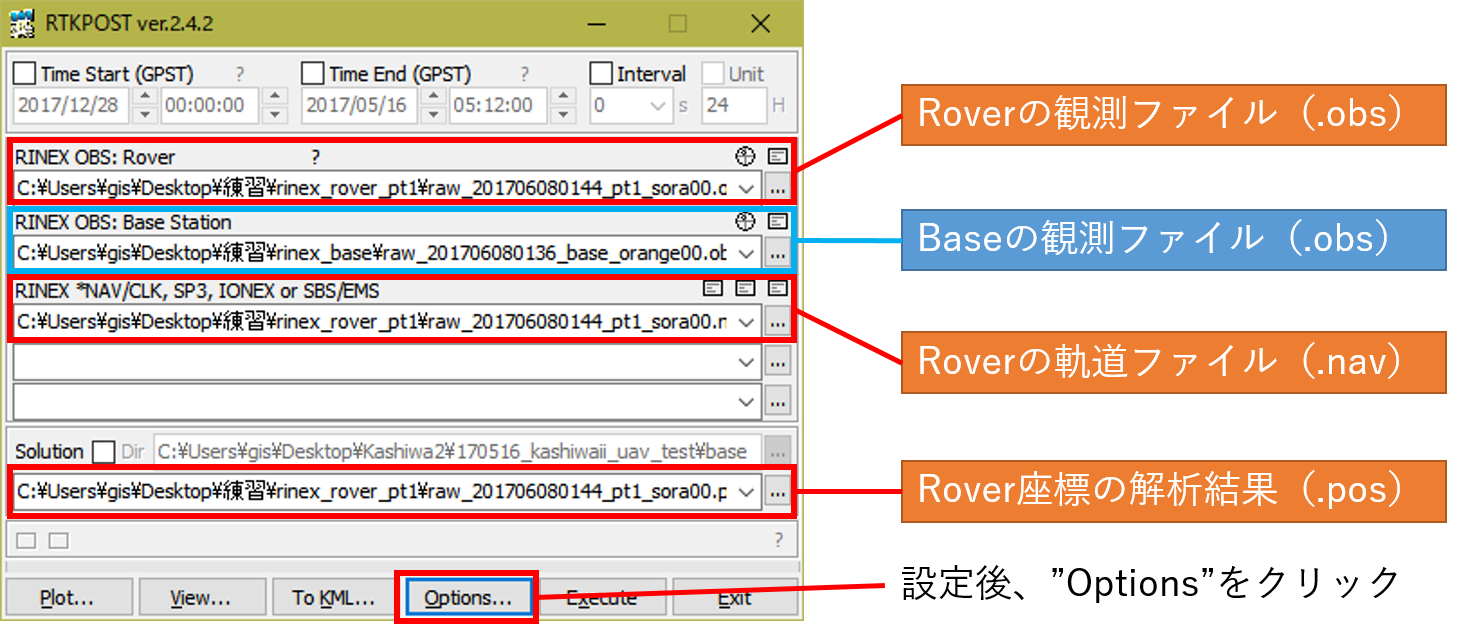
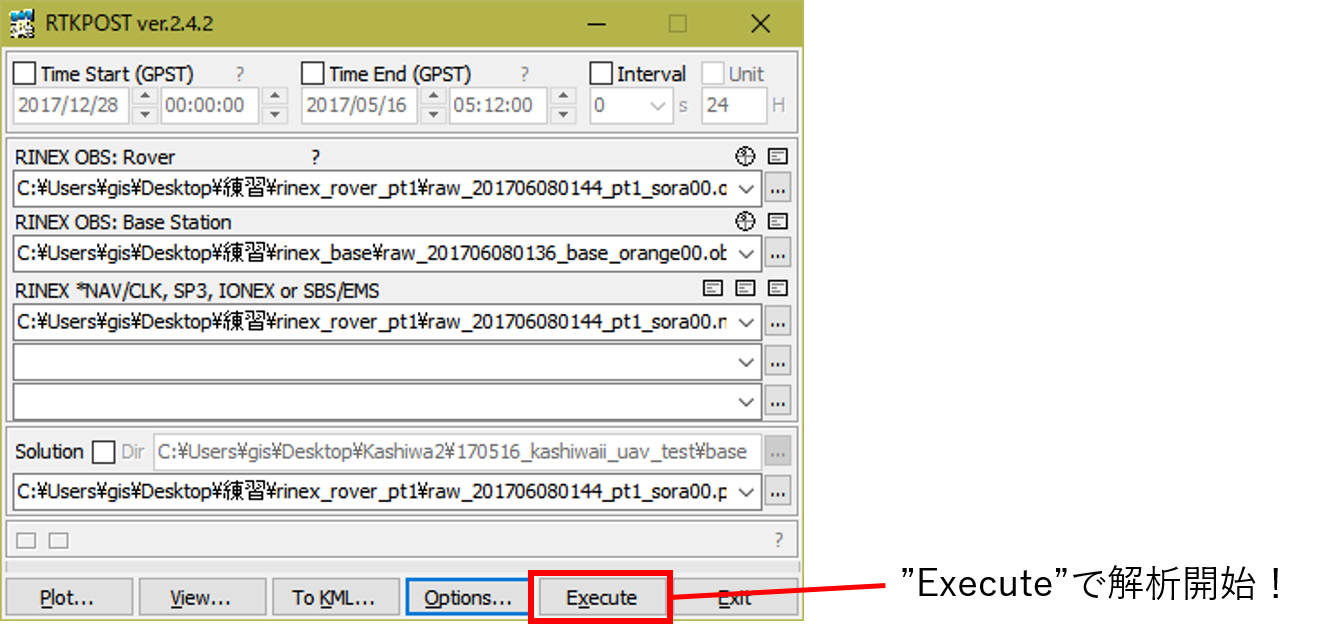
RTKPOSTでRoverの座標を求める
RTKPOST(RTKLIB/bin/rtkpost.exe)
- rtkpost.exe: 一般的にはこちらを使用
- rtkpost_mkl.exe: インテル® マス・カーネル・ライブラリーが利用可能な環境の場合
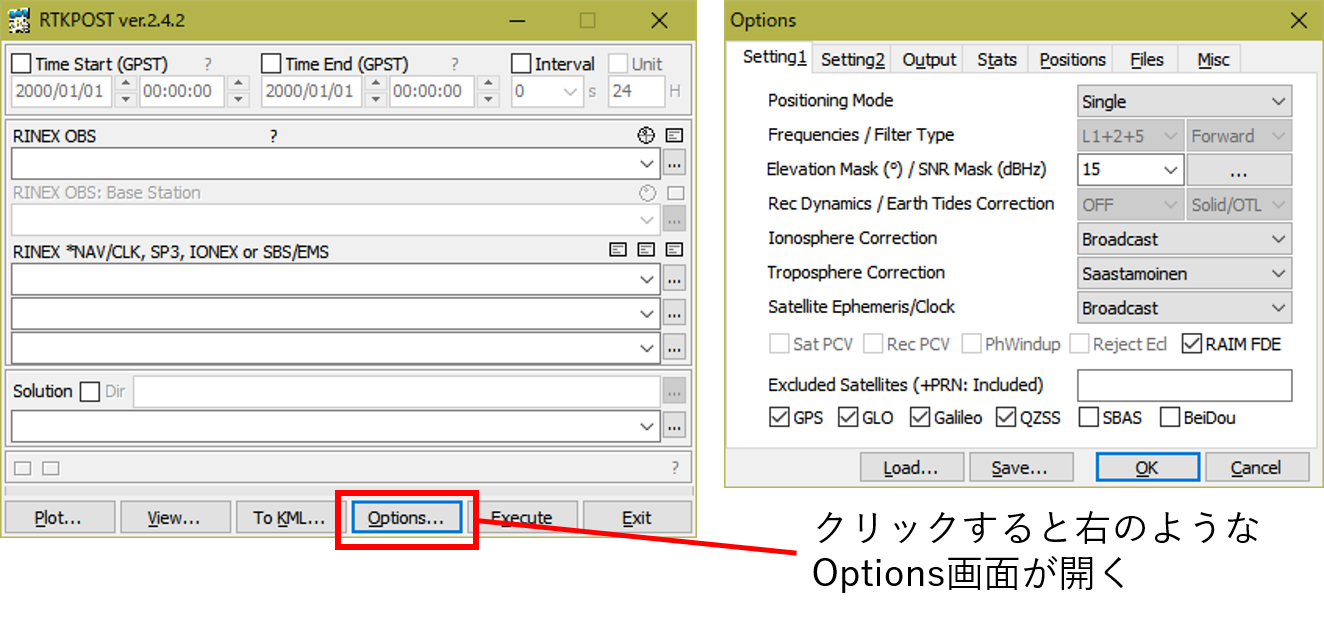
- 初めてRTKPOSTを使用する時のみ、以下の操作を最初に行う
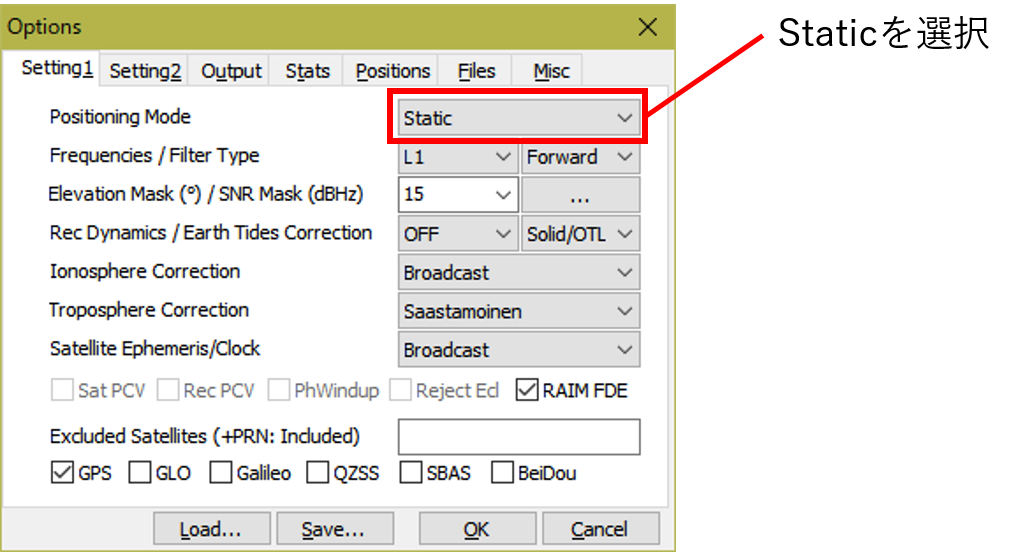
- Options画面の”Positioning Mode”を”Static”に変更
- Static: 定位置の地点を観測する場合
- Kinematic: 移動体を観測する場合
- “OK”をクリックしてOptions画面を閉じる
- Base/Roverの観測データ(RINEXファイル)を設定する
- Base/Roverの各ファイルを設定する欄に注意
- Options画面で”Static”に設定していない場合、Baseファイルを設定できない
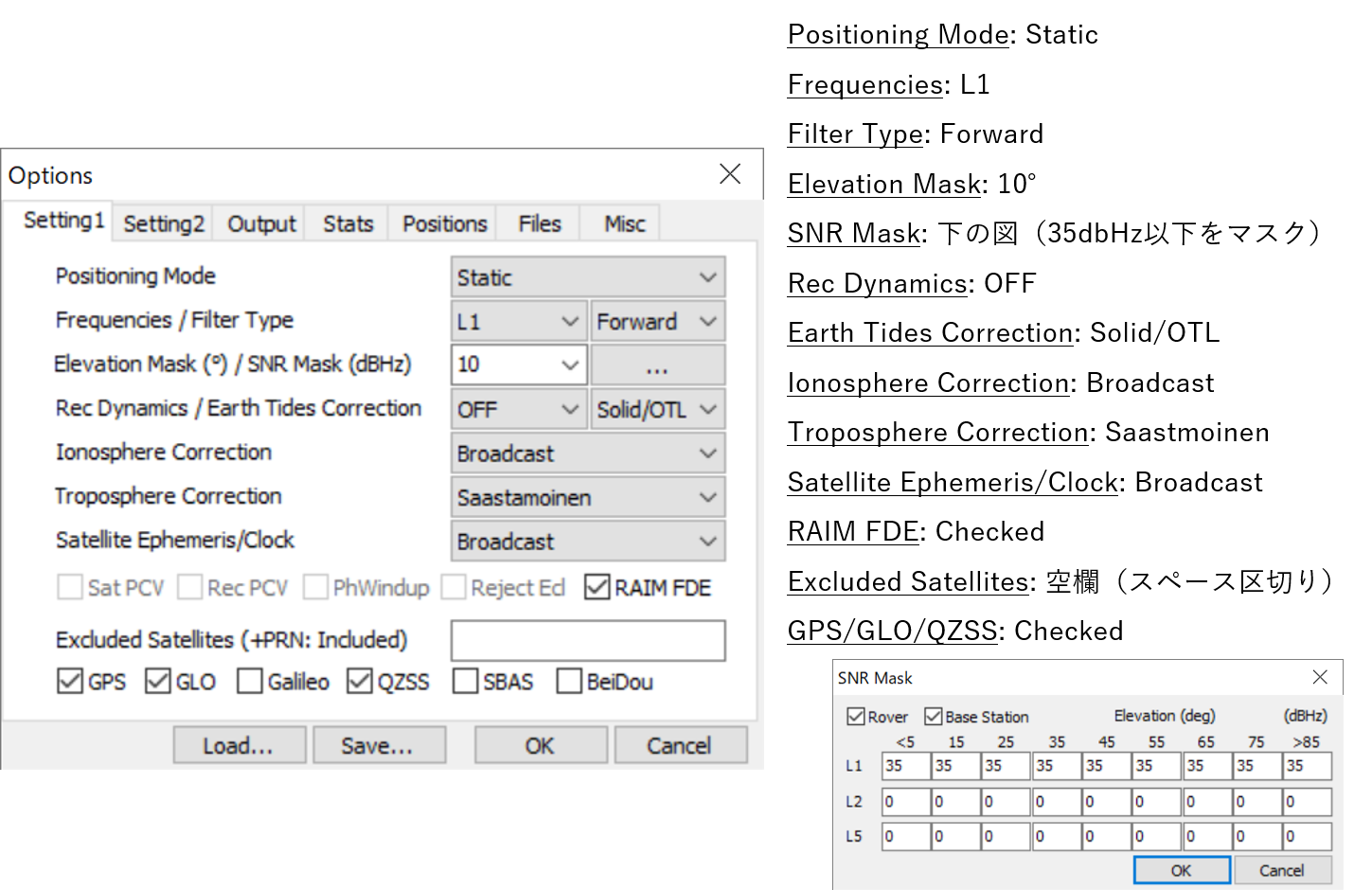
Options “Setting1”の設定
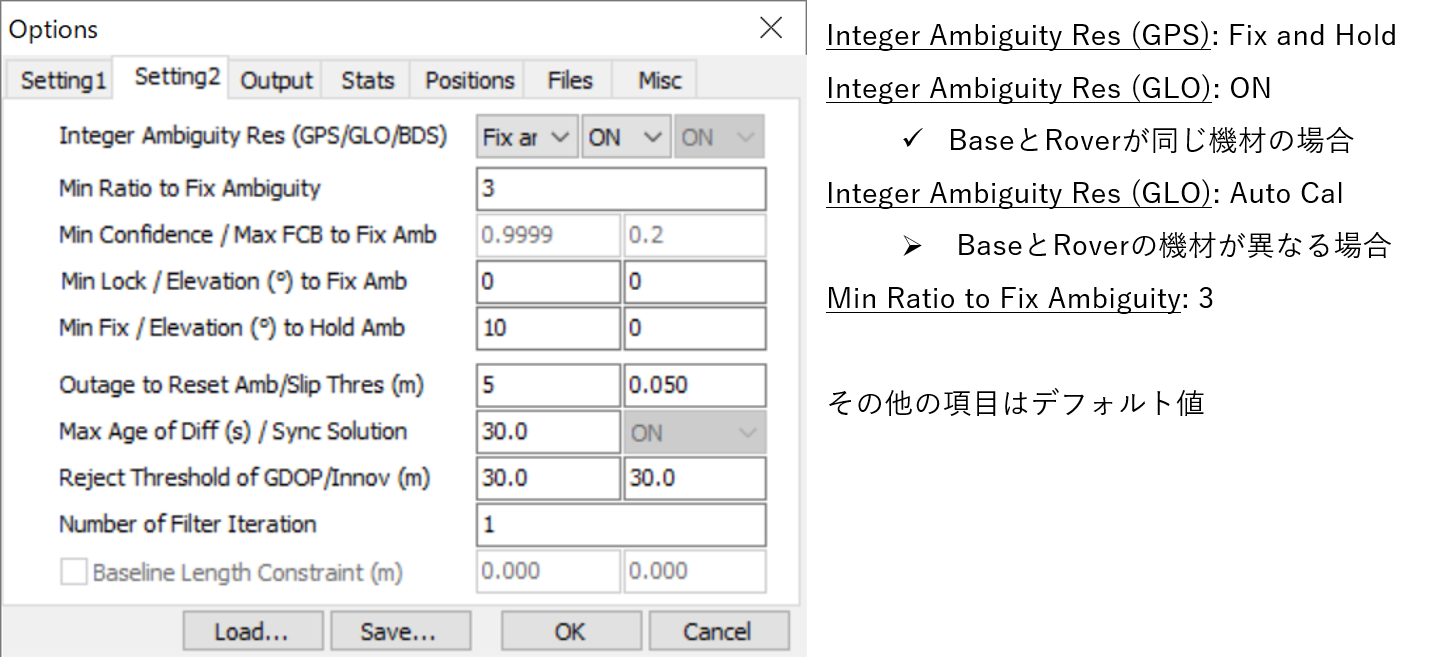
Options “Setting2”の設定
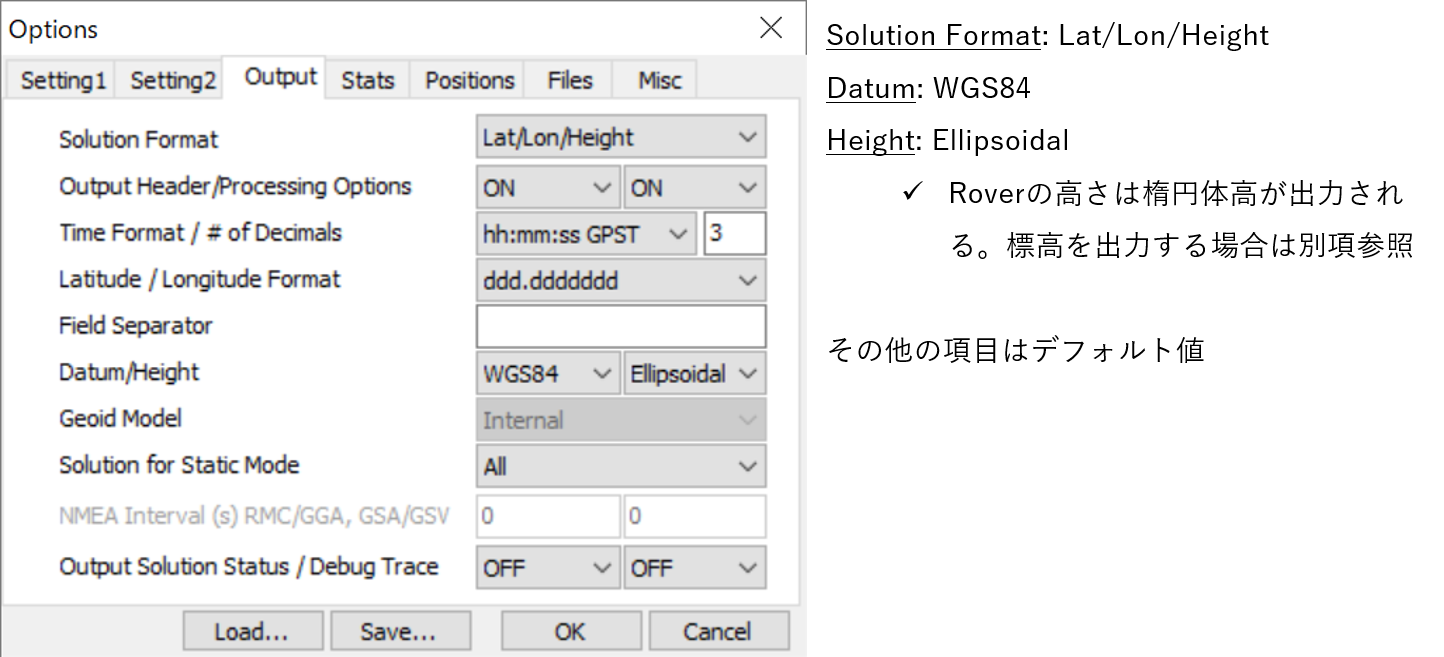
Options “Output”の設定
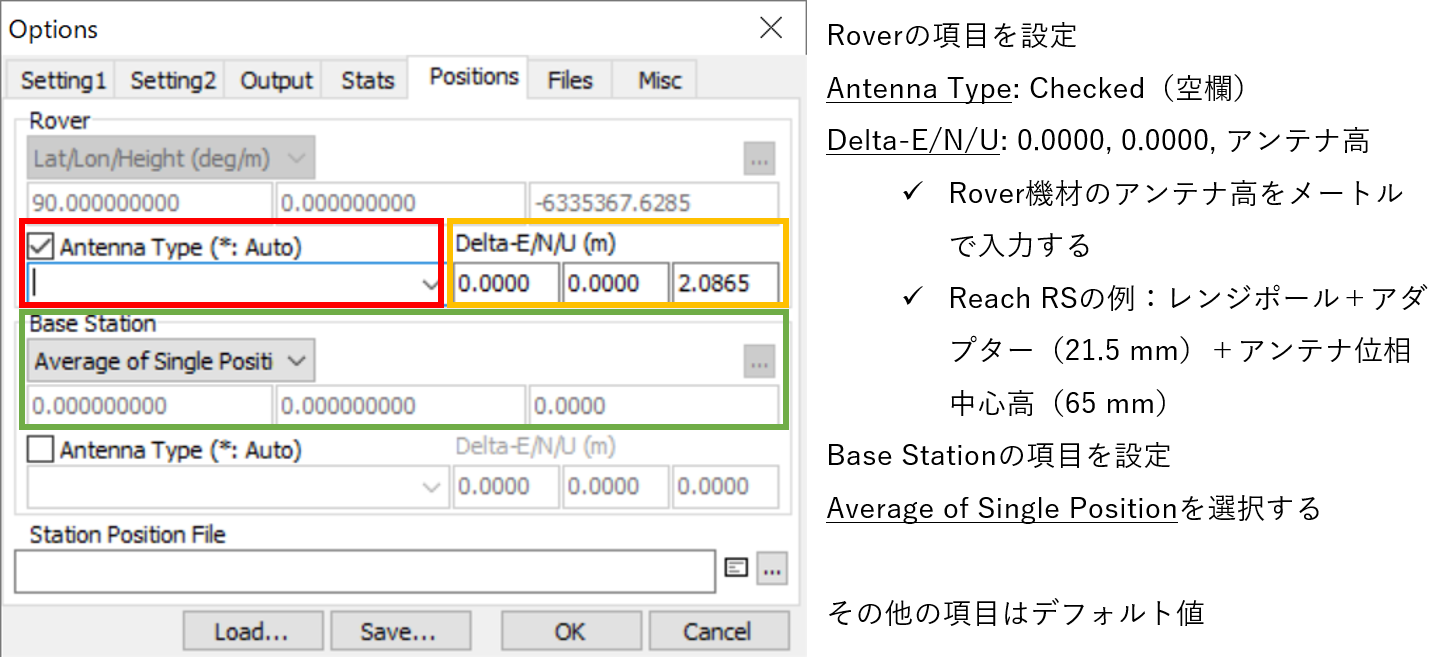
Options “Positions”の設定
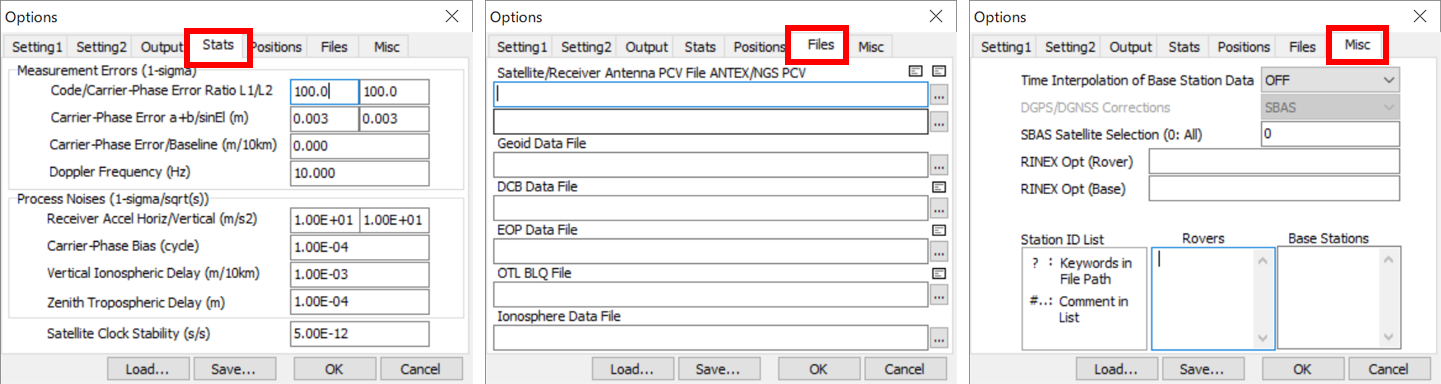
Options “Stats”, “Files”, “Misc”の設定
- すべてデフォルト
- 空欄にすべきところは空欄であることを確認する
- Base/Roverの観測データ(RINEXファイル)を設定しましたか?
- Optionsのすべてのタブの設定項目が適切であることを確認しましたか?
- Optionsは以前の設定値を記憶しているため、解析のたびに確認が必要
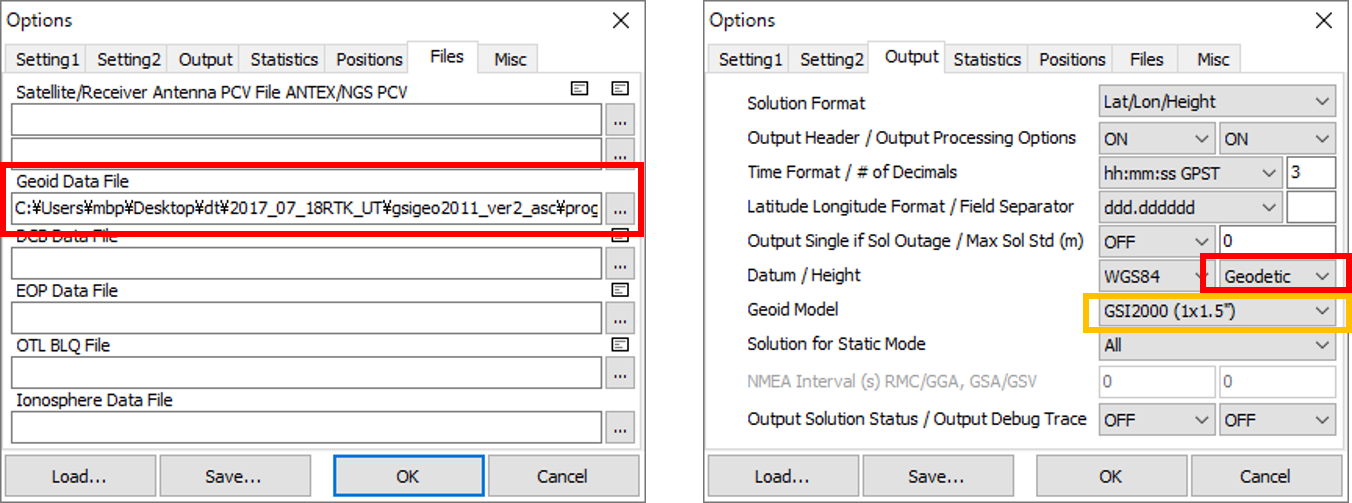
【参考1】Roverの「標高」を出力する:RTKPOSTにGSIGEO2011を設定する
- “Options”を開いて
- “Files”タブの”Geoid Data File”にgsigeo2011_ver2.ascを指定(左図)
- “Output”タブの”Datum / Height”で”Geodetic”を指定(右図)
- 同タブの”Geoid Model”で“GSI2000 (1x1.5”)“を指定(右図)
- RTKLIB 2.4.2は最新のジオイドモデルに対応していない(正常動作しない地域がある)
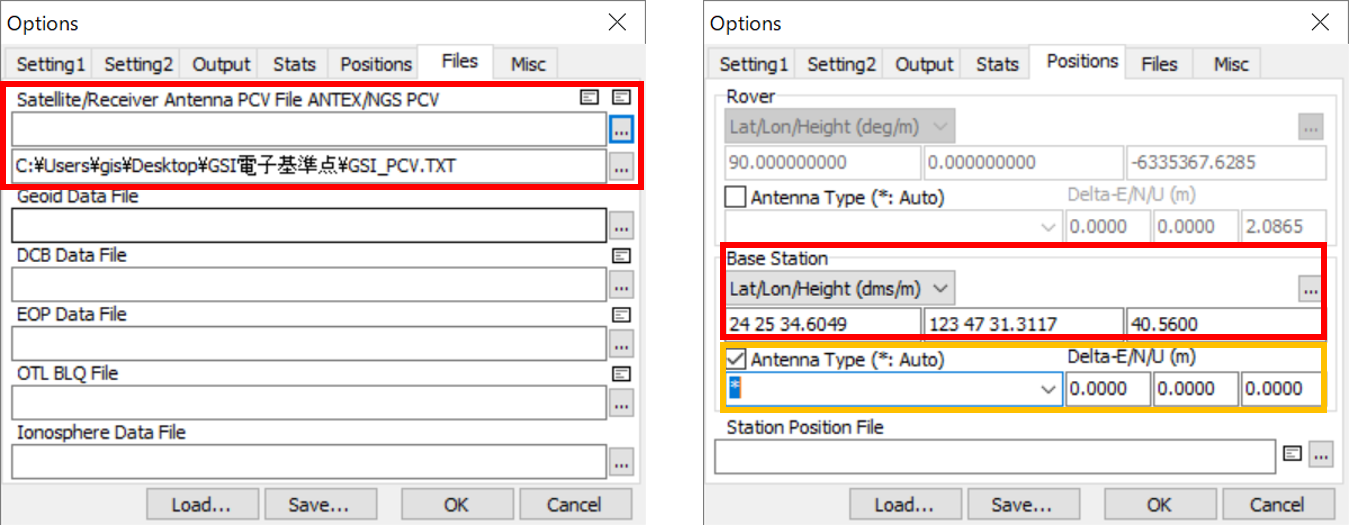
【参考2】電子基準点データの使用:RTKPOSTに座標とPCV補正ファイルを設定する
- “Options”を開いて
- “Files”タブの”Receiver Antenna PCV File”にGSI_PCV.pcv(または.TXT)を指定(左図)
- 受信機のアンテナファイルは2行目に指定する。 1行目は衛星のアンテナファイルを指定する欄
- “Positions”タブの”Base Station”に電子基準点の座標+楕円体高を入力(右図)
- 同タブのBase Stationの”Antenna Type”に「 * 」(自動選択)を入力(右図)
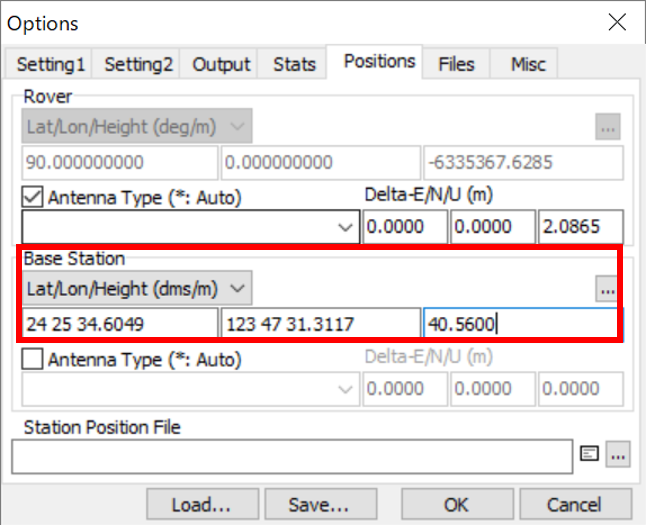
【参考3】Baseの絶対座標の使用:RTKPOSTにBase座標を設定する
- “Options”を開いて
- “Positions”タブの”Base Station”にBaseの絶対座標+楕円体高を入力
- dmsで入力する場合、度分秒の数値を半角スペースで区切る
- 同タブのBase Stationの”Antenna Type”のチェックを外す
- PPK解析では、Baseアンテナ位相中心の位置からRoverまでの基線ベクトルを求めるため、Baseのアンテナ高の入力は不要。入力すると「アンテナを設置した地面」の高さを意味する。そこじゃない。
成果出力
Roverの座標を出力する
- 解析結果(.pos)のテキストファイルを参照
- Fix解の場合:Ratio = 999.9となった最終行の座標
- Float解の場合:Ratioが最も高い行の座標
ノウハウ
【解説1】RTKPLOT
- GNSS観測データ(.obs)と解析結果(.pos)を図化するソフトウェア
- 観測データの図化:受信衛星の数と品質(高度、SNR、マルチパス)の評価
- 解析結果の図化:解の品質(Grd Trk, Position, AR)の評価
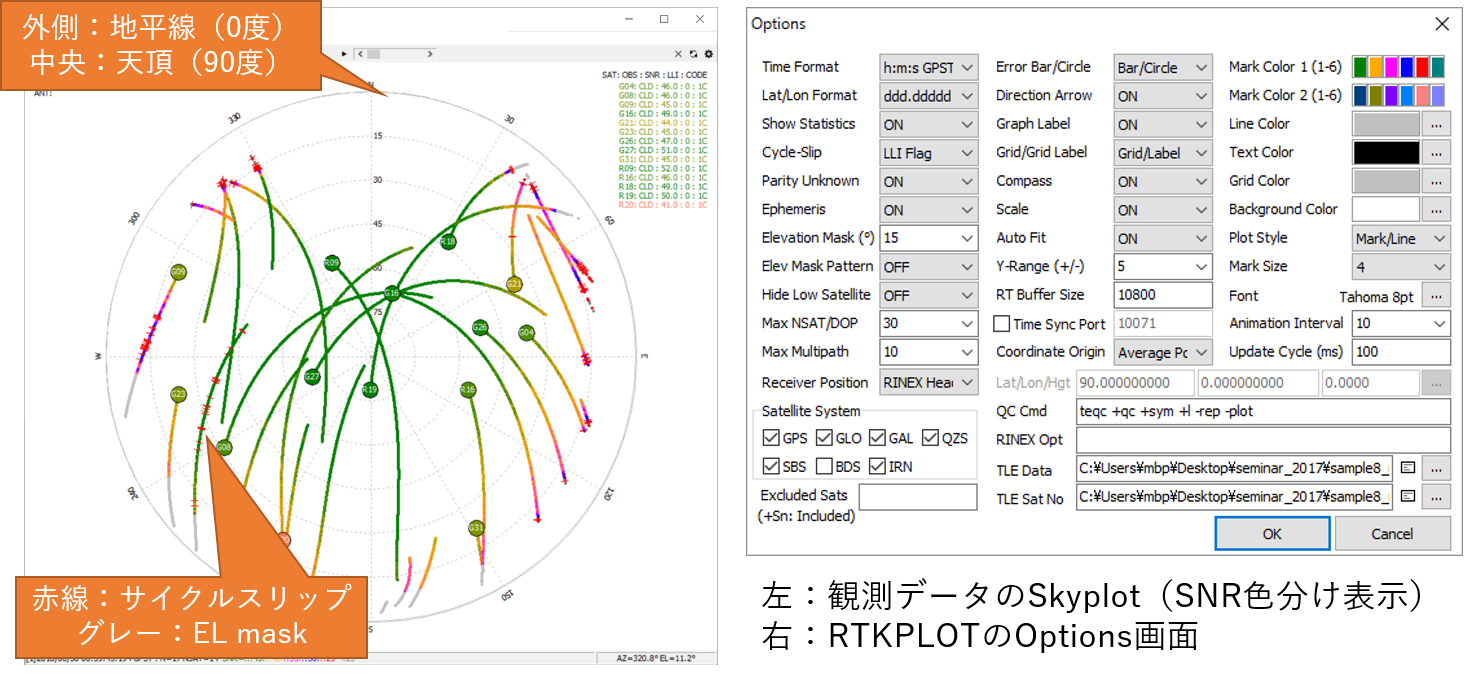
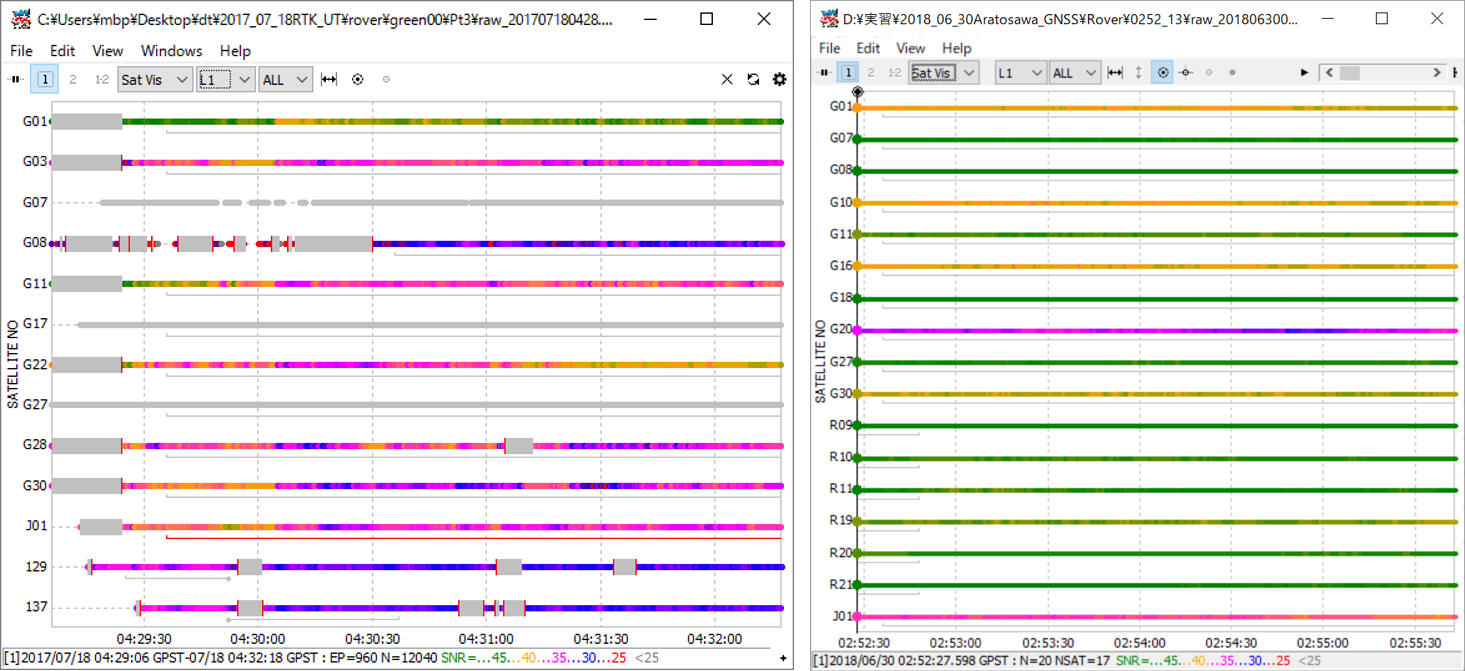
GNSS観測データ(.obs)の図化:BaseとRover両方の観測データについて評価する
- 受信衛星の数と品質(高度、SNR、マルチパス)の評価
- 左の例は全体的にSNRが低く(35dbHz以下)、Fix解は得られないかもしれない
- 右の例は受信状態が良いが、G20, J01のSNRが低く、解析から除外したほうが良いかもしれない
解析結果の図化(.pos)の図化
- 解の品質(Grd Trk, Position, AR)の評価
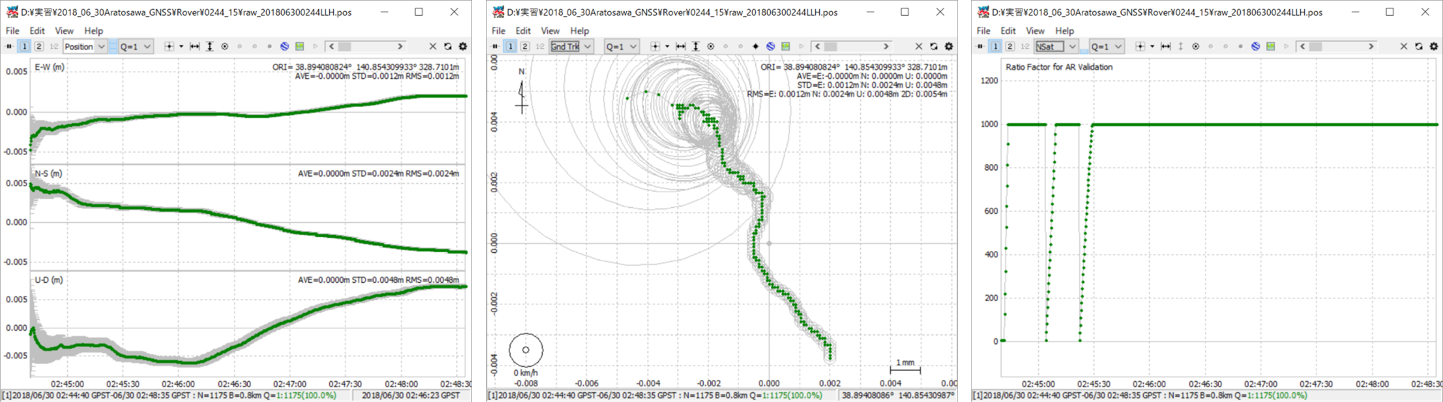
- 下の図は同じ解析結果を図化したもの。観測期間の全エポックでFix解が得られている
- 左はPosition図。E-W, N-S, U-D(XYZ)各軸の位置の変動を見る。いずれも±5 mm以内であり、良好
- 中はGrd Trk図。マスの目盛は1 mm。グレーの円はエラーサークルで、時間の経過とともに小さくなっている。南北8 mm、東西5 mmの範囲にすべての解が収まっている
- 右の図はRatio Factor for AR Validation図。Ratio Factorの最大値は1,000。解析期間中のほとんどのエポックで1,000を示し、変動も少ない。安定した測位解が得られている
- 解の品質(Grd Trk, Position, AR)の評価
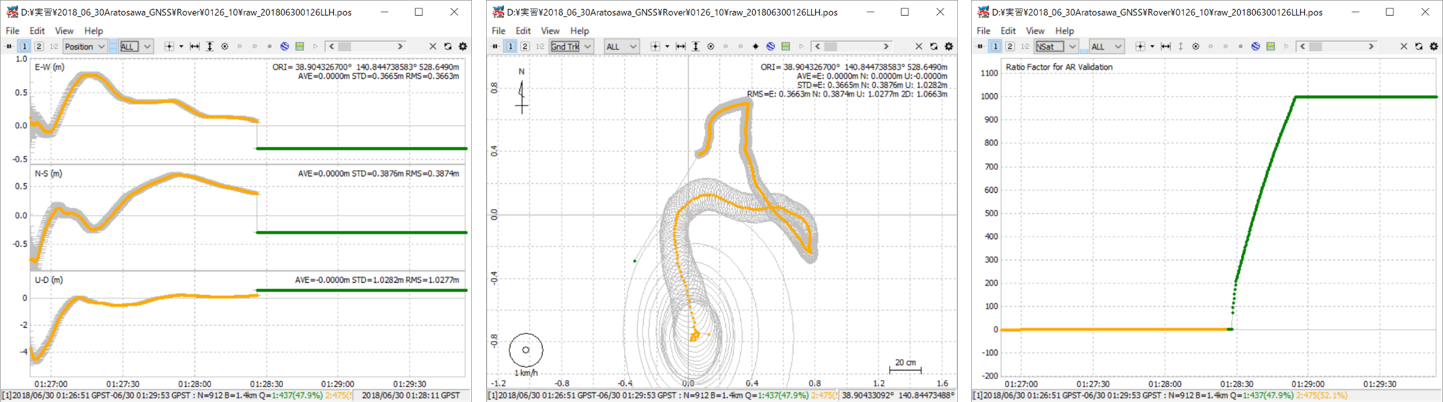
- 下の図は同じ解析結果を図化したもの。観測期間の前半がFloat、後半がFix解となった
- 左はPosition図。Float解(オレンジ色)の水平方向は1 m、垂直方向は4 mの変動がみられる
- 中はGrd Trk図。マスの目盛は20 cm。エラーサークルは時間の経過とともに小さくなり、Float解は南北1.6 m、東西1 mの範囲に収まる。Fix解は中央左下の1点に収束している
- 右の図はRatio Factor for AR Validation図。Ratio Factorはゆっくりと上昇するが、最大値の1,000に達した後は安定している
【解説2】L1-DGNSS測量と解析のポイント
- 計画
- 同じ測位衛星システム内で5つ以上の衛星を、良いSNRで受信が継続できること
- 受信環境が最も良好で安定した場所にBaseを配置する。建物の屋上がベスト。車の屋根の上も可
- Baseの周辺は立ち入り禁止。サイクルスリップや振動による精度劣化が生じる
- 基線長を小さくする(Baseを観測領域の中央に置く)
- 雨天や濃霧など、BaseとRoverの上空の大気状態が異なると誤差も増加する(二重差による誤差要因の相殺ができない)。基線長のZ方向の差が大きい場合も同様。長期観測ではそうした影響も考慮し、気象データを用いた対流圏遅延補正を行う必要がある(中島・他、2018)
- 測量
- アンテナ高は2 m以上とする(人間や植生による電波遮蔽の低減)
- Roverは過酷な自然環境の中でも丁寧に作業できる人が担当する 設置精度を最大限に高める(NG:石突の位置ズレ、ポールの傾き、計測中の揺れ)
- 揺れは厳禁(地球は自転し、公転し、衛星も地球を周回する。計測中の僅かの揺れでも悪影響がある)
- 高さのあるものから可能な限り離れて計測する(電波遮蔽軽減) アンテナを直接、地面に置いて計測しない(電波遮蔽の元凶)
- 解析
- 低高度でもSNRが高い場合は解析に使用する
- 植生の葉っぱは電波を通すが、SNRを低下させる
- SNRが低い、SNRが低い状態で安定しない、サイクルスリップがある衛星は除外する
- 観測期間の途中で登場する衛星は、除外したほうが良い場合もある(ARがリセットされる)
- パラメータをいじって無理やりFixさせない(衛星の除外を除き全Roverを同じ条件で解析する)