GNSSの仕組み
GNSS - Global N avigation Satellite System
- 衛星からの電波を受信することにより、緯度・経度・高度の連続観測ができる測位システム
- GNSS:衛星測位のシステムの総称
- GPS(アメリカ合衆国)、Galileo(ヨーロッパ連合)、GLONASS(ロシア)、北斗(中国、QZSS(日本)

GPS - Global Positioning System
1978 最初の測地衛生の打ち上げ
1993 システムの正式運用
1996 平和的民生利用への政策指針
1998 GPS利用の日米協力推進体制
2000 May 精度劣化操作(SA)の解除
現在:衛星数24個(予備含め約30個)
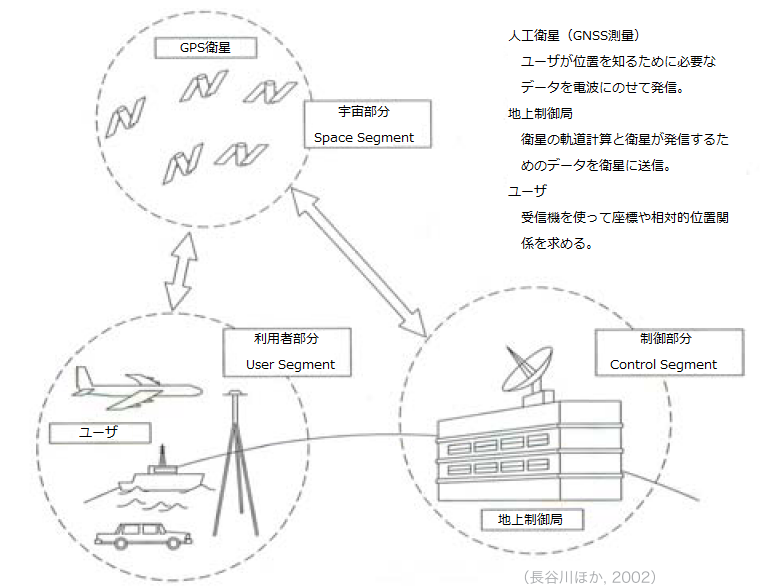
GNSSの基本構成

GPS衛星からの電波信号
- 2種類の搬送波
- L1帯:1,575.42 MHz
- L2帯:1,227.6 MHz
- 測距信号
- 混線防止と衛星識別のため、疑似ランダム雑音符号(PRN)により暗号化される
- C/Aコード:L1波、民生用に開放
- P(Y)コード:L1・L2波、米軍用に限定(観測は可能)
- 補正信号
- SBAS (Satellite-Based Augmentation System)
GNSS測量の分類と概要
| GNSS(GPS)測位法の種類 | 観測時間 | 成果課題 | 測位精度(水平方向) | 適用領域 |
|---|---|---|---|---|
| 単独即位 | 数分~数秒 | リアルタイム | 10 m~ | 船・車などのナビゲーション |
| 相対測位・ディファレンシャル法(DGNSS) | 数秒~数分 | リアルタイム/後処理 | 0.1~数 m | 航空機のナビゲーション、船位測量、工事用車両の運行管理 |
| 相対測位・干渉測位・スタティック法 | >60分 | 後処理 | 5 mm | 1~4級基準点測量、地すべり観測 |
| 相対測位・干渉測位・短縮(高速)スタティック法 | 10~20分 | 後処理 | 5 mm | 3~4級基準点測量 |
| 相対測位・干渉測位・後処理キネマティック法(PPK) | >1分 | 後処理 | 10-20 mm | 3~4級基準点測量 |
| 相対測位・干渉測位・リアルタイムキネマティック法(RTK) | 数秒~1分 | リアルタイム | 10~20 mm | 3~4級基準点測量 |
GNSS受信機価格帯(JPY)
| 測位法 | 価格(JPY) | 精度 |
|---|---|---|
| 単独即位 | 数千~数万 | 101 m |
| ディファレンシャル即位 | 数十万 | 10-1~100 m |
| 干渉測位(RTK, VRS, スタティック) | 数百万 | 10-3~10-2 m |
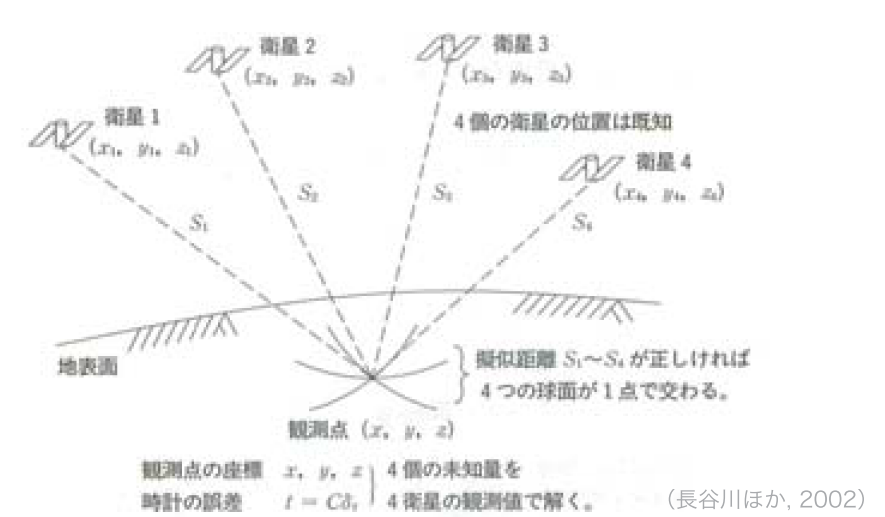
単独即位
- 1台の受信機を用いて同時に4個以上の衛星からの電波を受信
- 測点から各衛星までの距離
⇒後方交会法によって観測点の位置を求める
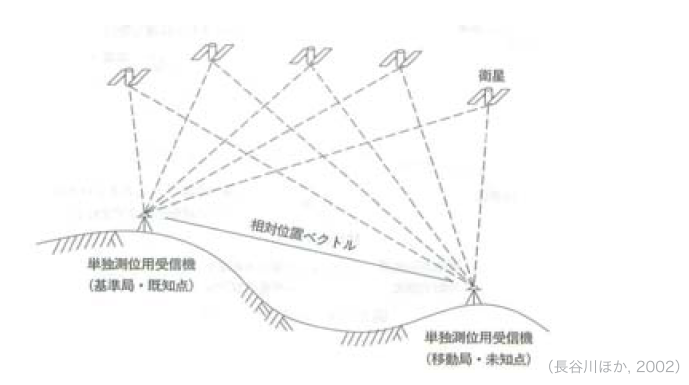
ディファレンシャル即位(DGPS)
- 複数の観測点(基準局と移動局で同時に単独即位を行い、肯定された基準局からの相対位置で移動局の誤差補正を行う。
SBAS(Satellite-Based Augmentation System)
- 補正信号が静止衛星から送信される
- リアルタイムなディファレンシャル即位
- 精度:- 5 m程度
- 地域別に運用
- 静止衛星であるため常時補足可能
- 米国:WAAS(Wide Area Augmentation System)
- EU:EGNOS(European Geostationary Navigation Overlay Service)
- 日本:MSAS(MSTAT-based Satellite Augmentation System)=ひまわり
- 航空機やハンディGPSにも搭載
各地域におけるSBASの運用
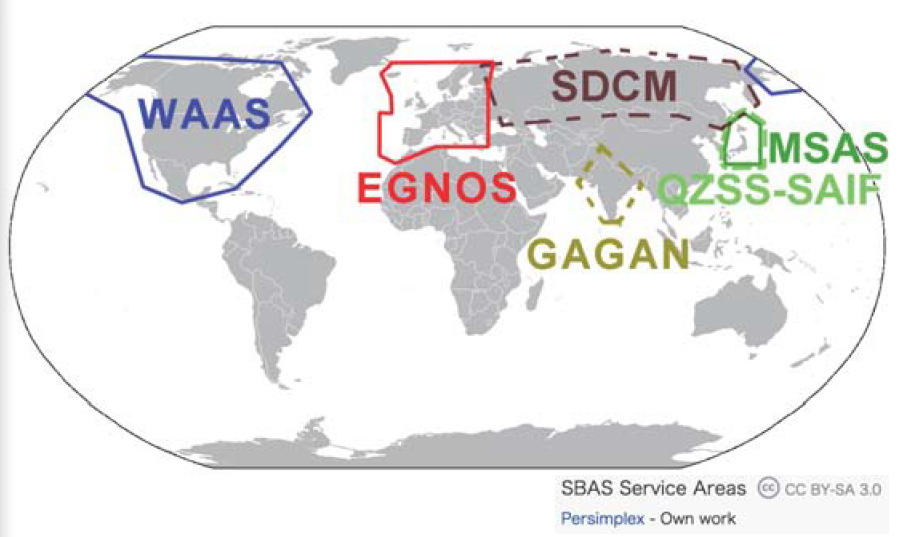
米国WAAS:2003年7月~
日本MSAS:2007年9月~
欧州GNSO:2005年~
インドGAGAN:2013年以降
干渉測位
- 搬送波の位相差を利用する高精度測位法
- 基線解析
- 2台の受信機(基地局・移動局) ⇒同時に受信した搬送波の位相差を測定
- 基線ベクトル(受信機間のの距離と方向)の算定
- 整数値バイアス
- 位相差測定で読み取り可能なのは1波長未満だけで、整数部分は不確定
- 観測開始時にこれの確定(初期化)が必要
干渉測位の種類
- 静的干渉測位(スタティック法)
- 1時間以上の連続観測
- 高速(短縮)スタティック法:10~20分
- 1時間以上の連続観測
- 動的干渉測位(キネマティック法)
- 初期化(整数値バイアスを決定・保存)後、後処理で基地局と移動局間の基線ベクトルを算出
- 測点ごとの整数値バイアスの確定作業が不要
- 各測点において数秒~1分程度に観測
- リアルタイムキネマティック(RTK)即位
- 基線解析のリアルタイム処理
- 基地局と移動局間相互の無線通信 (Bluetoothや携帯電話網(VRS)など)
- 初期化(整数値バイアスを決定・保存)後、後処理で基地局と移動局間の基線ベクトルを算出
電子基準点
- 国土地理院が全国約1,200箇所に設置しているGPS連続観測局
- 1994年~
- 地殻変動等の連続観測
- ディファンシャル/キネマティック補正のための基地局データを提供
- 2015年6月29日リニューアル

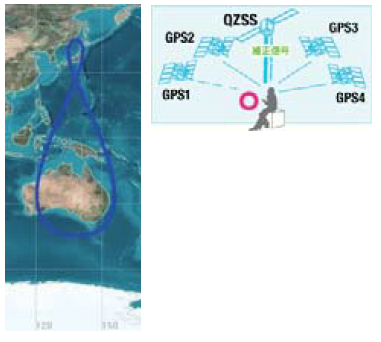
準天頂衛星システム
- QZSS:Quasi-Zenith Satellite System
- 宇宙航空研究開発機構(JAXA)
- 準天頂衛星初号機みちびき(QZS-1)
- 2010年9月11日打ち上げ
- GPSの補完・補強
- 常に天頂付近に衛星がある!
- 補正信号⇒測位精度を高める
- 目標精度
- 高速移動体で1m以上
- 低速移動帯で数cm