learning
2. 測量
“誤差が大きい?高精度だよ。ポールの傾きがよく出ている“
測量の前に…:その機材、電波法に適合していますか?
- 電波法への準拠
- 技術基準適合証明等のマーク(技適マーク)がない機器を使用すると違法になるおそれがある
- 例)海外製(個人輸入、業者が少量を輸入)
- 例)最新の機器(技適申請が完了していないかもしれない)
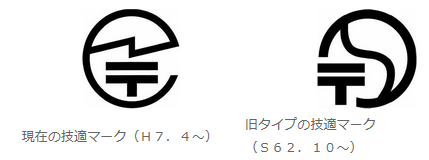
- 総務省「電波利用ホームページ」の解説を参照
- 同ページにて技術基準適合証明等を受けた機器の検索が可能
- EMLID社のReach RS, Reach RTKは国内使用可能
- 基盤がIntel Edison(工事設計認証番号007-AC0199)のため、そのまま利用可能

- 同社の新製品Reach RS+, Reach M+は技適申請が完了していない
- 国内で使用すると違法。一年以下の懲役又は百万円以下の罰金(電波法第110条)
L1-DGNSSとRTKLIBによるPPK解析:測量
測量(現地作業)
- 取得する測位衛星システムと頻度の設定
- 標準は、GPS, GLONASS, QZSS, 5 Hz
- 移動体の場合、頻度を上げると小さい動きも再現できる(かも)
- 10 m/sで飛行するUAVの場合、5 Hzでは2mごとの計測となる
- 取得する測位衛星システムの種類や頻度を上げるとデータ量が増える
- BeiDou(中国)は日本上空の飛来数が多いが、電子基準点で取得していない
- Baseの設置、観測開始
- Baseの最短観測時間の目安:電子基準点からの基線長(km)×10分(最短45分)
- 通常、Rover観測作業中に十分に長い時間の観測が可能
- 測量地点にRoverを設置し、観測を開始
- Roverの観測時間:3分~
- 開空率が低い、基線長が長い、薄い植生の遮蔽、GDOPが高い場合は時間を延長
- Baseの観測終了
Base/Roverの設置と観測の一般的な注意事項
- Base
- 開空率が高く、揺れず、出入りがない場所

- Rover
- バイポッドは風向きに正対して設置する
- 風が強い日はポールに手を添えておく
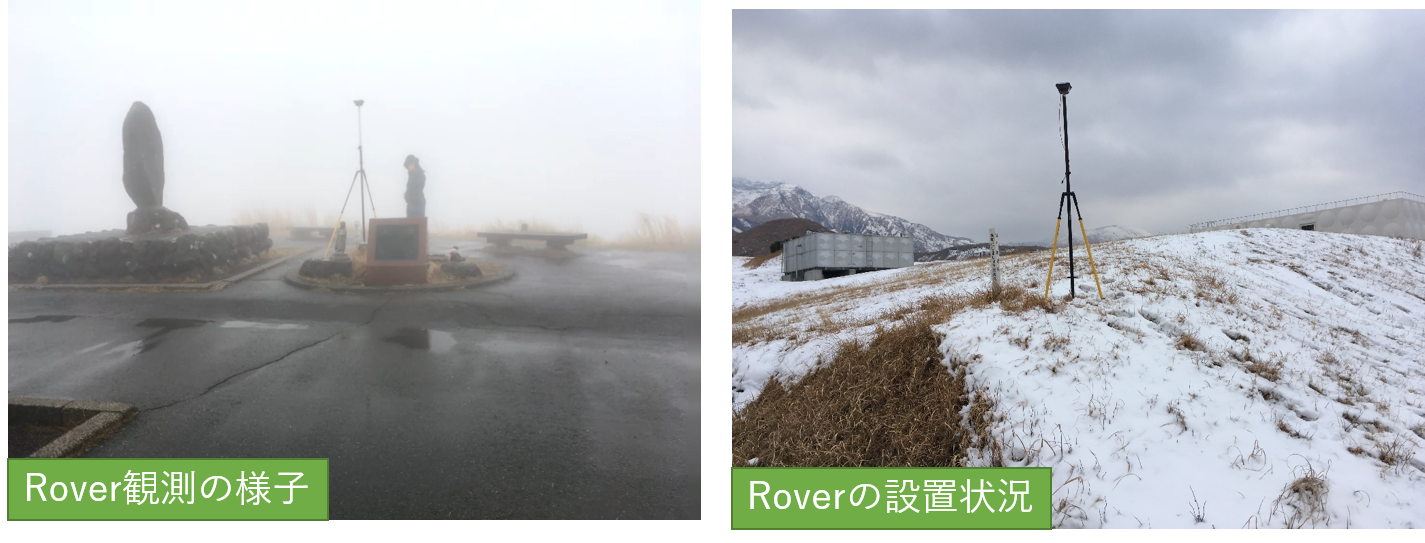
Roverの設置と観測
Roverの設置と観測(EMLID Reach RS/RTKでの操作例)
- 測量地点にRoverを設置(可能な限り、厳密に垂直に)
- 2 mのポールが20分(0.33度)傾いた場合、水平方向に1.3 cmの誤差が生じる
- 精密かつキャリブレーションされたポールを使用する
- 設置は慎重、丁寧に!!
- 気泡管を斜め上から見ているようではNG
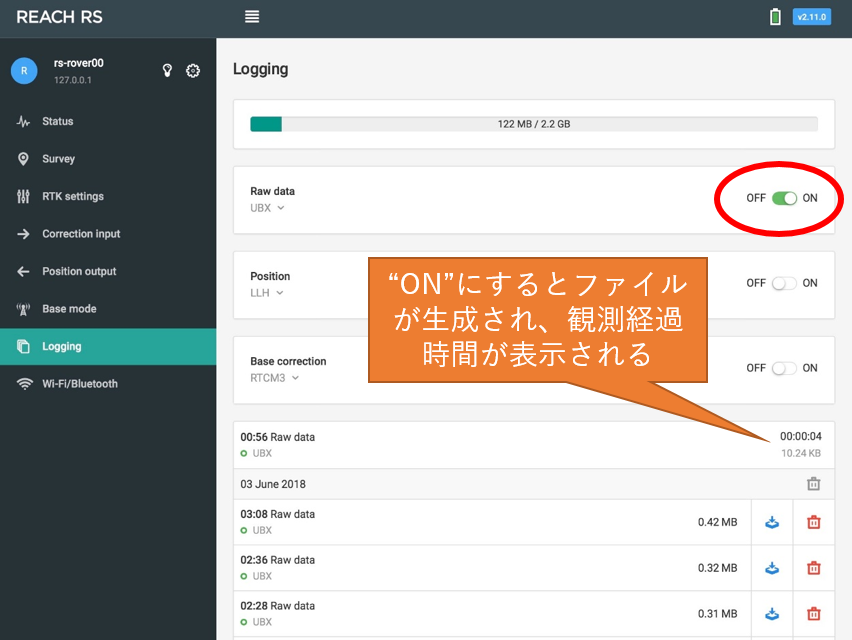
- 観測を開始(Raw dataを”on”)
- 風による転倒、揺れを警戒
- 写真撮影
- 計測環境の遠景写真(複数)
- 計測地点の近接写真
- 観測を終了(Raw dataを”off”)