learning
1.計画
“成功は(失敗は)その時点で約束されている”
はじめに
GNSSで観測したBaseとRoverのデータを使って、RTKLIBでは何をしているのか?
- 基線ベクトルを求めている
- 基線ベクトル:BaseとRoverの三次元的な位置関係(距離と向き)
- Roverの座標は基線ベクトル解析の結果を利用して間接的に求めた値
- Roverの座標を得るまでプロセス
- BaseからRoverまでの基線ベクトルを求める
- Baseの座標を原点としてRoverの座標を求める
- ユーザーが設定した出力座標系に合わせて座標変換
- Rover座標を解析結果(.posファイル)に出力
- BaseとRoverの位置関係(基線ベクトル)は、Base座標に関わらず一定。すなわち、Base座標に誤差(位置ズレ)があれば、Roverの座標も同じ位置ズレを持った値になる
- Roverの絶対座標を得ようとする場合、Baseの絶対座標を求める必要がある
- Baseの絶対座標:正確には、Baseのアンテナ位相中心の座標(Baseを設置した地面の座標ではない)
基本用語
計画
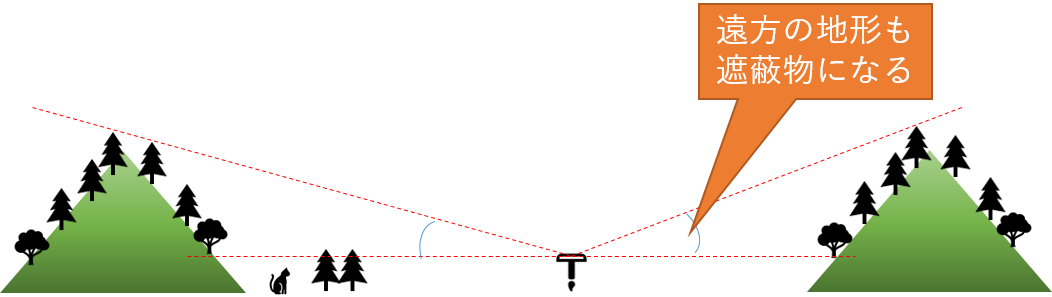
Base設置場所の検討
- 開空率:物理的に空が開けていること。観測期間中の衛星が多く飛来する方角を確認する
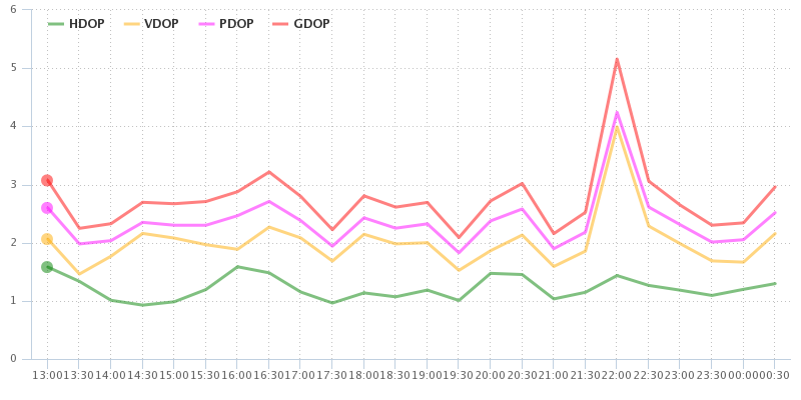
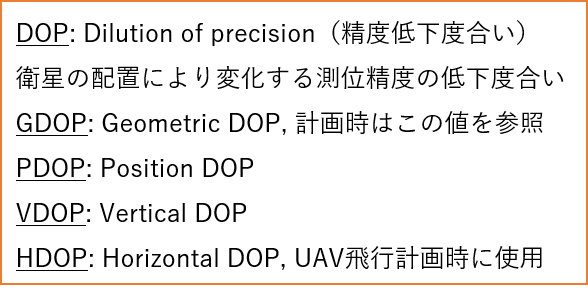
- GDOP(次ページ):観測期間中の衛星配置の状況を確認する
- GNSS Radar
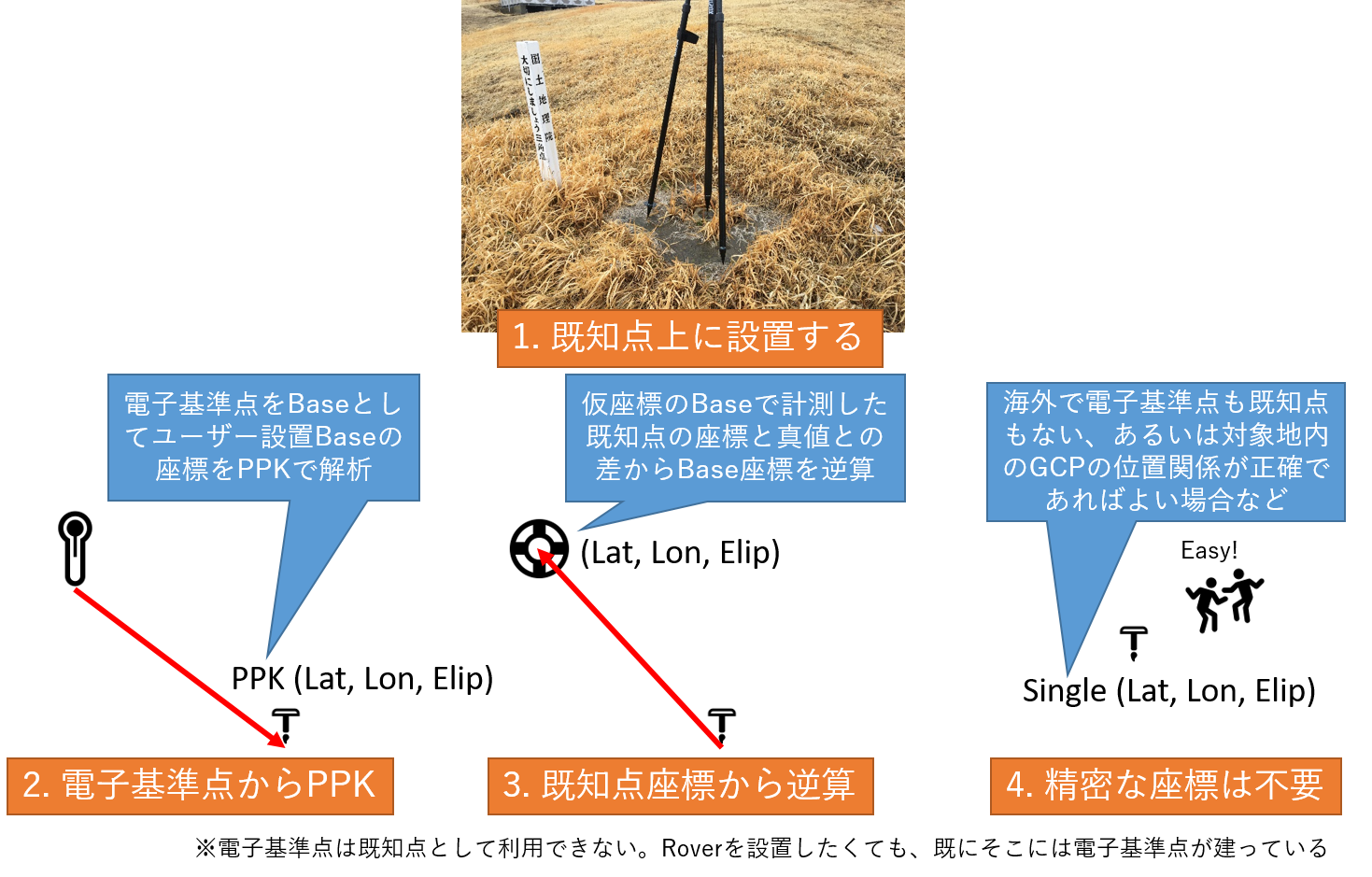
Baseの絶対座標を得る方法の選択【重要】Base座標にかかわらず基線ベクトルは一定
- 既知点上に設置する(Base座標を計測により求める作業は不要)
- 電子基準点からPPKでBase座標を求める(電子基準点をBase、ユーザーBaseをRoverとしてPPK解析)
- 既知点をRoverで計測し、Base座標を逆算する
- Baseの精密な絶対座標は不要(Base座標としてシングル解(一般的なGNSSロガーと同じ)を使用)
電子基準点・既知点の選択
- 近隣の電子基準点と基線長の確認(複数の地点を確認)
- 近隣の既知点と基線長の確認(複数の地点を確認。維持管理対象点または看視対象点を選択)
- 国土地理院 「基準点成果等閲覧サービス」

既知点は予備も含めて選択する
既知点は必ずしも利用できるわけではない(「点の記情報」を熟読)
- 計測できない理由は無限にある。予備地点をいくつか用意する
- 保護枠が移動し柱石が傾いていたり
- 柱石の設置状態が不安定化していたり
- 周囲に高い木や建物があったり(GNSS電波の受信障害)
- 構造物の中に取り込まれていたり(どうやって測るの・・・)
- 植生や落ち葉や土砂に深く埋積していたり(まずは掃除から・・・)
- 存在しなかったり… etc.

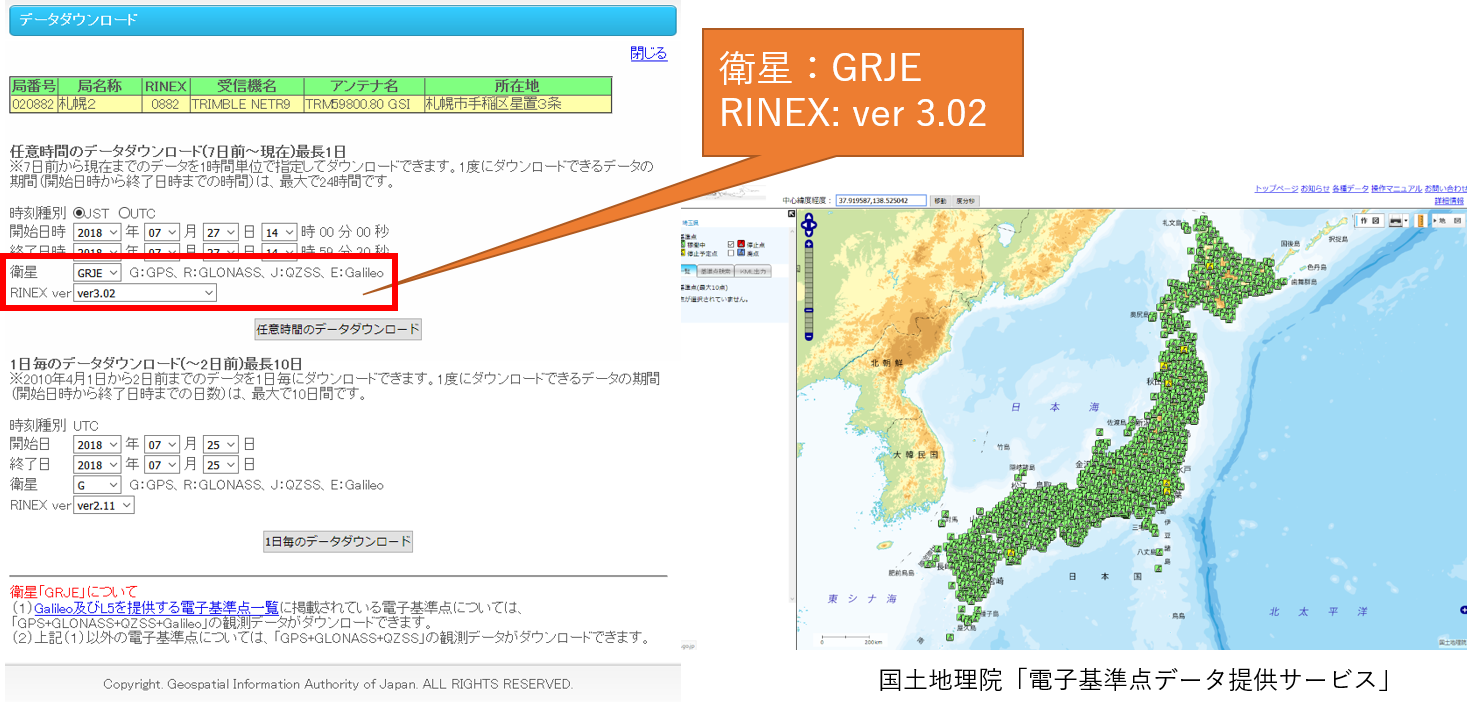
電子基準点データの使用
Baseの座標を電子基準点で求める場合
- 電子基準点RINEXファイルを入手
- 国土地理院「電子基準点データ提供サービス」Webサイト
- 「国土地理院共通ログイン管理システム」ユーザー登録が必須
- Webブラウザ版とFTP版のアカウントは別

- tar, gz圧縮されたままでRTKLIBで使用可能
- 「一日毎のデータ」は2日後からダウンロード可能
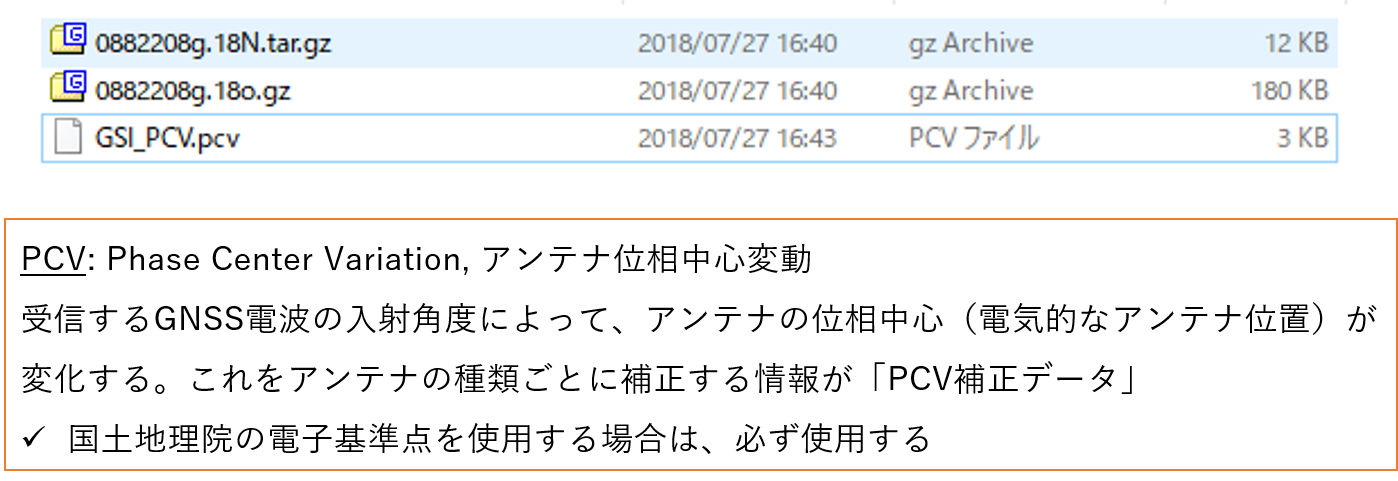
PCV補正データ(GSI_PCV.TXT)のダウンロード
- RTKLIBでは、拡張子を「.pcv」に変更しておくとスムーズに認識される
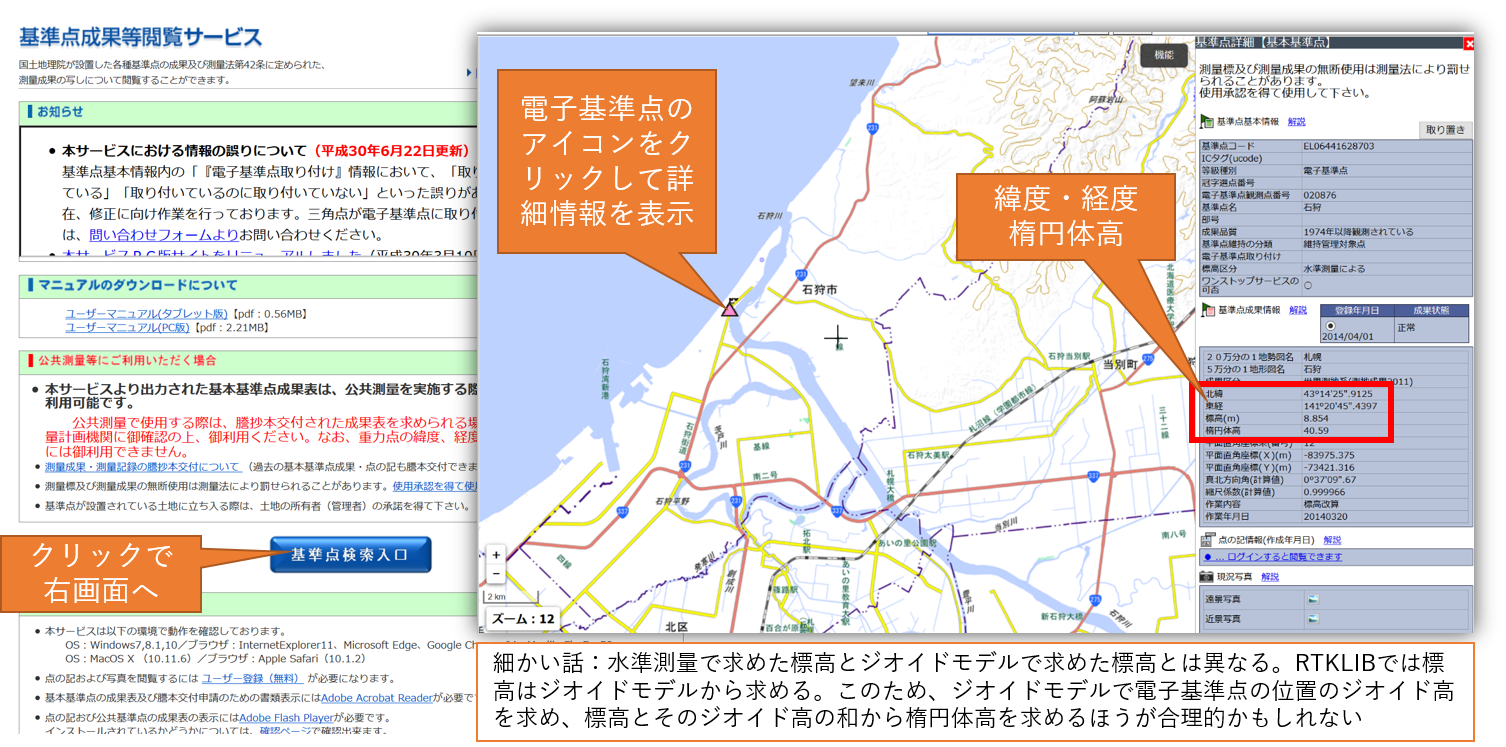
- 電子基準点の測量成果(座標値)を調べる
- 国土地理院「基準点成果等閲覧サービス」
- RTKLIBの解析に必要な座標値は経緯度と楕円体高(標高ではない)
- 国土地理院「ジオイド高計算」
- RTKLIBの解析に必要な座標値は経緯度と楕円体高(標高ではない)
以前の資料をご覧の方へ「日々の座標値(F3)」は使用しないでください
